Set the User profile to RadiossV2023 and the Unit system to N_mm_s_T.
Set User Interface style as New.
Set your working directory to where the downloaded file is located.
Click Run.
Click File > Import > Radioss.
In the input window, select SEAT__00D00.rad.
Click OK.
Merge Models
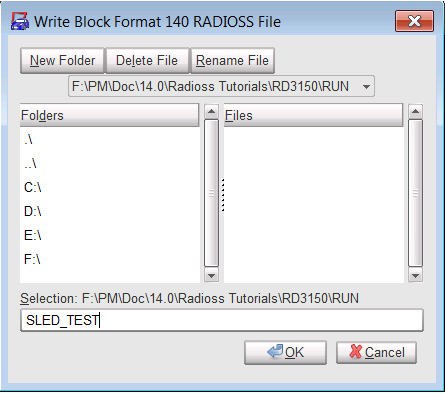
Click File > Import > Radioss.
Figure 1.
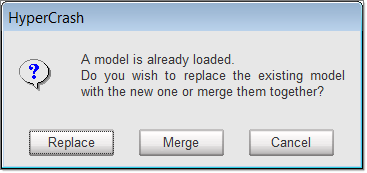
A HyperCrash message window prompt
appears.
Click Merge.
Select the file FLOORD00.rad.
Click OK.
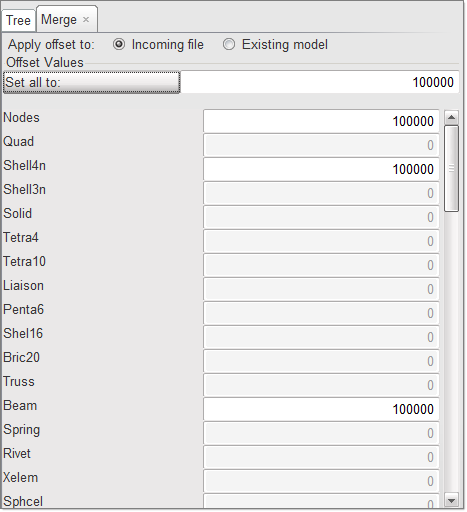
In the Set all to field, enter the value 100000.
Click the Set all to button to offset the numbering of
all the entities.
Figure 2.
Click Merge to merge the floor model.
Redo the steps 1 to 7 for the cushion model:
File:
FOAMD00.rad
Set all to offset: 200000
Redo the steps 1 to 7 for the seatbelt model:
File:
BELTD00.rad
Set all to offset: 300000
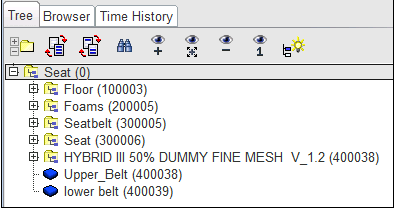
Set Model Hierarchy
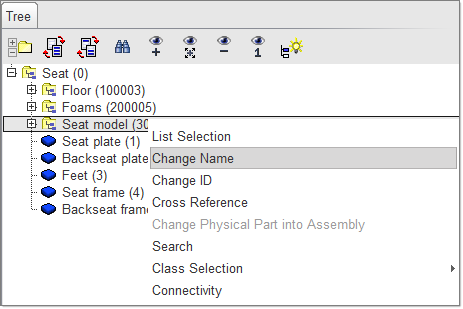
Click the Tree tab and select
the subset of
the seat named Seat model (300005).
Right-click and select Change Name.
Figure 3.
In the Change Name window, enter the name
Seatbelt.
Click Ok.
Click any item on the tree, right-click and select New
Assembly.
Enter the name Frame and click
Ok.
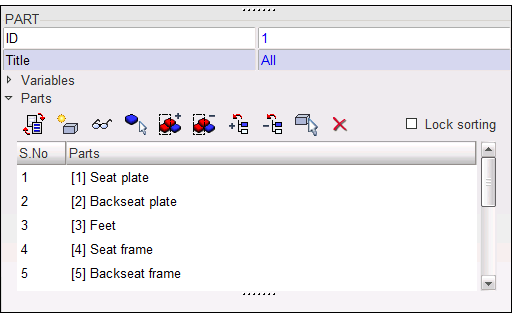
Select the parts Seat plate, Backseat
plate, Feet, Seat
frame, and Backseat frame using the
Shift or Ctrl keys.
Press and hold the middle mouse button and drag the selected parts into the new assembly Frame.
Select the Tree root (Seat) and right-click.
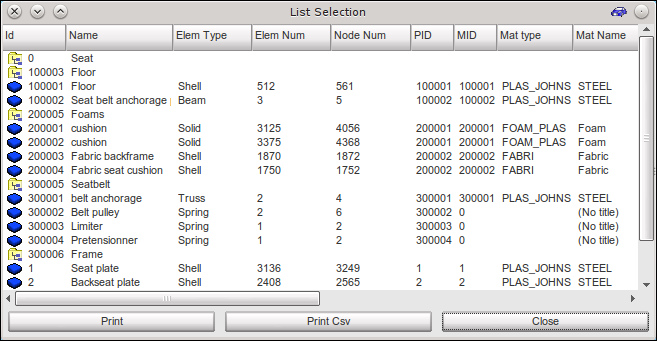
In the pop-up menu, select List Selection.
Figure 4.
The List Selection dialog opens.
In the displayed window, check if all parts have properties (PID) and materials
(MID).
Click Close > Export the model to save.
Connect Models
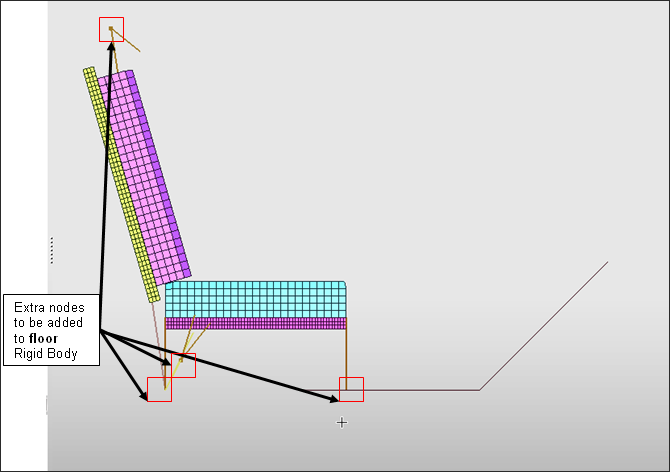
To add the feet of the seat and the seatbelt anchorage point to the floor rigid
body:
Click Mesh Editing > Rigid Body.
Figure 5.
Select the rigid body: Floor.
Click See selected rigid bodies ().
Click Display All and then Left
View (F11).
Right-click in the Grnod_Id entry box and click
Select in graphic, click Add nodes by box
selection and select all the nodes of the seat, feet and the
anchorage points of the seatbelt.
Right-click to validate.
Select the Floor rigid body in the list, right-click and
add the rigid body and main node to time history.
Figure 6.
Connect Seat Cushion to Seat Frame
Click LoadCase > Contact Interface.
Right-click in the window and select Create New > Kinematic condition (Type 2).
Display only the cushion parts. Press F11 for XZ view,
select Secondary nodes section, and click Add noes by box selection.
Holding down the Shift key, click to draw a polygon
window around nodes on the backside of cushion of the nodes.
Tip: Press the letter P for non-perspective
view, if needed.
Press Shift and draw a closed
polygon window around the nodes to select. When finished, release the
Shift key.
Display Frame Assembly in the Tree, pick Main surface
section, click Add/Remove a face and pick one
element on each part of the frame facing the cushion. Then select the
Expand option on the lower right corner to pick
select all.
Select the Expand option on the lower right corner to
select all the elements of the seat assembly facing the seat cushions.
Click Yes or Enter on the
keyboard to end the selection.
Figure 7.
For the Title of the contact, enter seat cushion
fixation.
Click Save.
Click at the top of the interface
panel, to check the interface.
Figure 8.
The created interface should be displayed with green text. Otherwise,
the interface has to be modified.
Click Close.
Click Export to save the model.
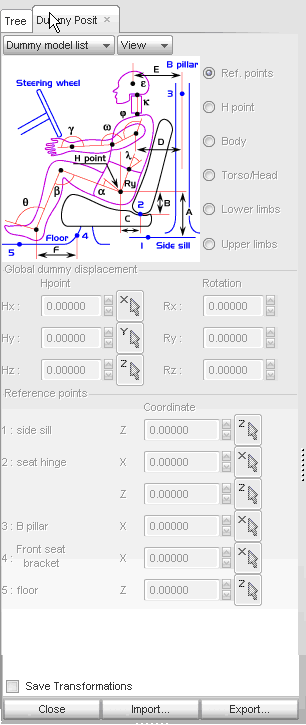
Position the Dummy
Click Safety > Dummy Positioner.
Figure 9.
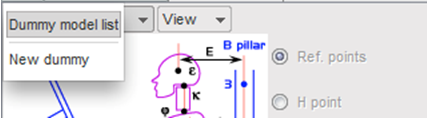
From the Dummy model list menu, select New dummy.
Figure 10.
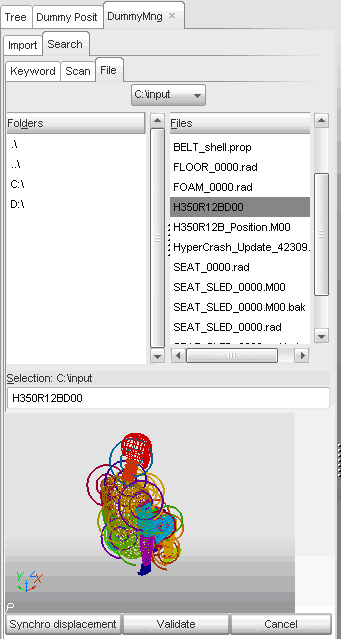
A DummyMng panel opens.
Select the File subpanel.
Select the file H350R12BD00.
Figure 11.
The dummy model is displayed in the small graphic window.
Click Validate.
Set Set all to value to 400000.
Click the Set all to button to offset the numbering of
all entities.
Click OK to merge the Dummy model.
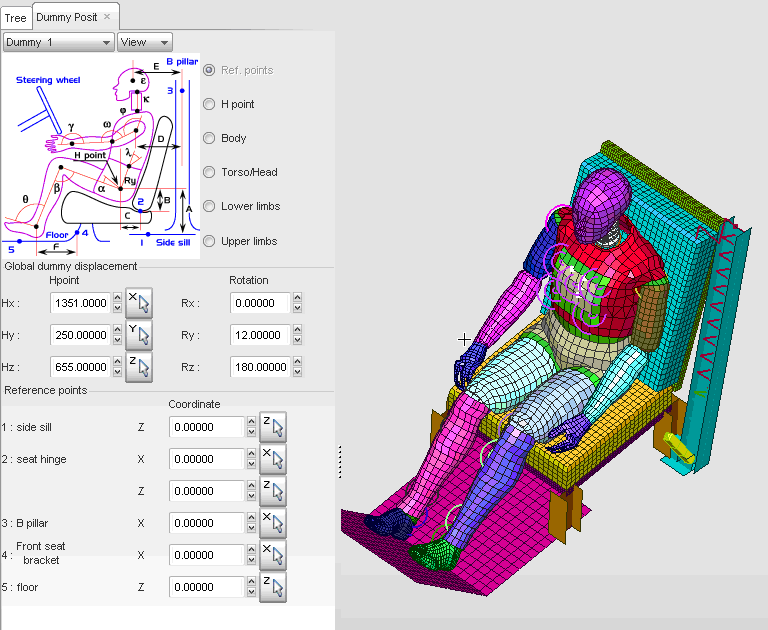
Click Import in the dummy positioning window and select
the file H350R12B_Position.M00 and click
OK.
H350R12B_Position.M00 contains all parameters for
the automatic dummy positioning. Figure 12.
Close the Dummy positioner and click Export to save the
model.
Add the Seatbelt
Click Safety > Belt Generator.
Enter the name Upper belt and click
OK to validate.
Figure 13.
Click Seat belt reference points ().
Click Add nodes by picking () and
select three nodes, as shown in the following image (red dots).
Figure 14.
Click Yes on the right corner and
OK to validate the node selection.
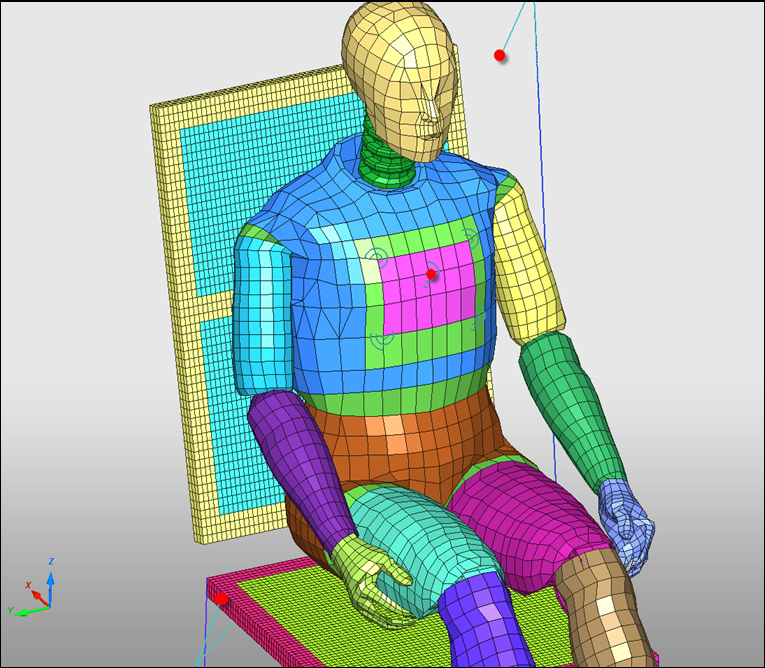
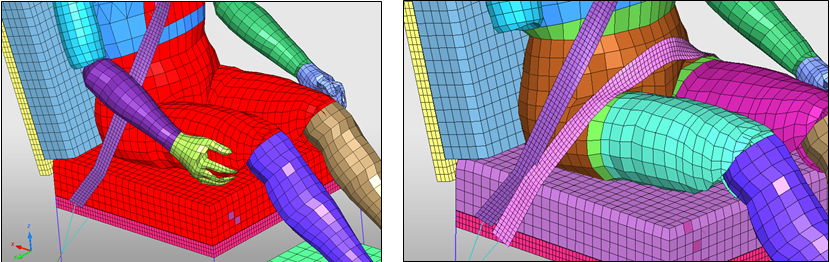
Click Add/Remove body parts () and
select the parts: torso, pelvis,
upper legs, and the seat cushion
fabric, as shown in red in the image.
Figure 15.
Click Yes to validate the selection.
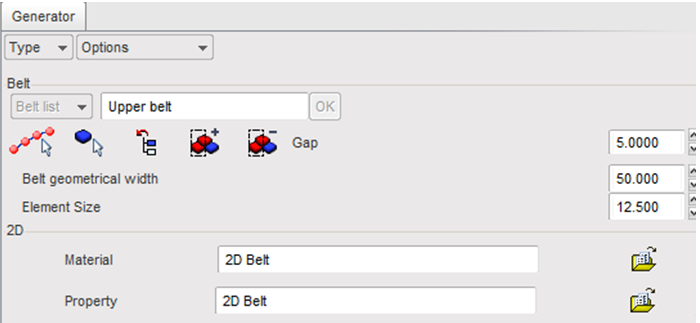
Set the Gap value to 5.00 mm.
Set the Belt geometric width to 40.
Set the Element Size to 8.
Click Material () and select the material file
BELT.mat you saved to your working directory.
Click OK.
Click Property () and select the property file
BELT.prop you saved to your working directory.
Click OK.
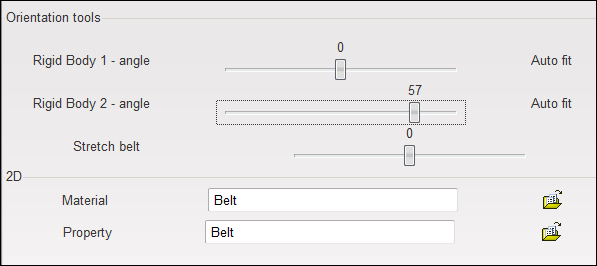
Click Preview to display the proposed seat belt. Some
intersections may exist between the seat cushion and the seat belt.
Use the orientation tools to modify the angle of the Rigid Body 2.
Figure 16. Figure 17.
Click Save to save the belt definition.
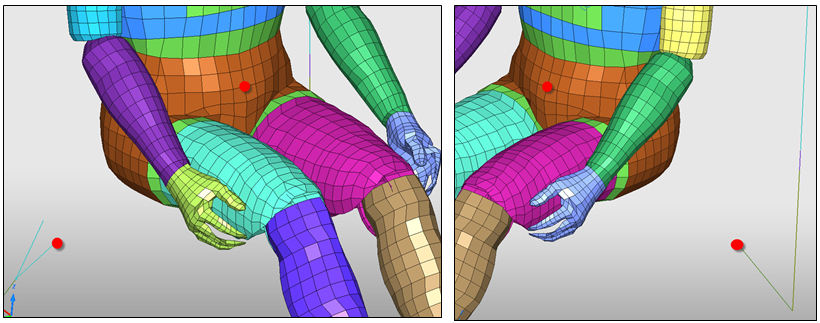
Redo the same operations in order to create the lower
belt. Select nodes, as shown below.
Figure 18.
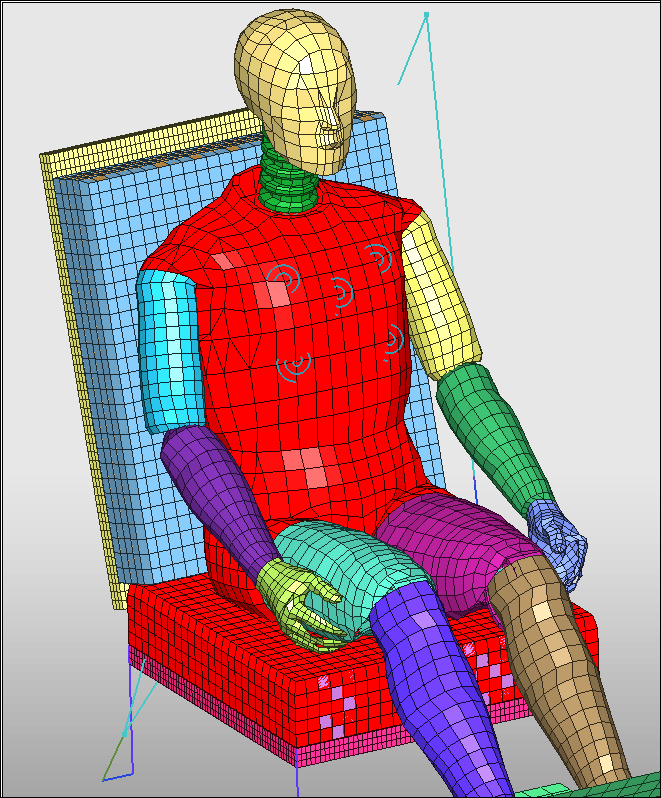
Select the parts: pelvis, upper
legs and seat cushion fabric.
Click Preview > Save > Close.
Figure 19.
Click Export to save the model.
Seatbelt versus Dummy
Create Contact Interfaces
During the seatbelt creation, two contact interfaces between the seatbelt and the dummy have been created. You will need to check and remove any remaining intersections and penetrations.
Click LoadCase > Contact Interface.
Select interface BELT ID 400038.
Click See selected ()
to display.
Click in Main Surface, right-click in the modeling window, and click Include picked parts to select the Fabric backframe and
the Backseat frame as they may come into contact with the shoulder belt during
the analysis.
Figure 20.
Click Save.
Select interfaces BELT ID 400038 and BELT ID
400039.
Click See selected ()
to display.
Set Coulomb friction to 0.3.
Set Friction penalty formulation to 2.
Click Save.
Select interfaces BELT ID 400038 and BELT ID
400039.
Click Check penetration selected interfaces ().
In the Quality panel, remove the intersections and penetrations using the
Depenetrate Auto ().
Click Close in order to come back to the Contact
Interface panel.
Click Export to save the model.
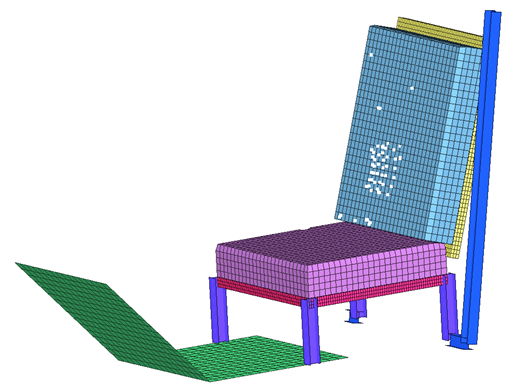
Create Seat Structure
Creation of Self-Impact between different parts of the Seat.
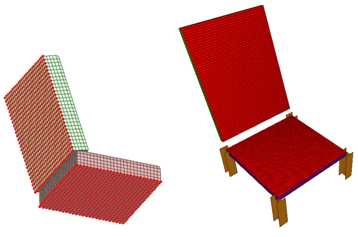
In the Tree window, select subsets Frame,
Floor and Foam.
Click the Isolate icon .
Figure 21.
Right-click in the Contact list and select Create NewMulti-usage (Type 7).
Click Self impact.
Set the Title to Self impact seat structure.
Set Gap/element option to Variable gap.
Set Coulomb friction to 0.2.
Set Friction penalty formulation to 2.
Right-click in the Main Surface entry box and click Select in graphics > Add selected parts of tree ().
Click Save.
Select the self impact seat structure interface in the
list.
Click Check penetration selected interfaces (). Some penetrations exist between the seat
cushion and the seat structure.
Switch to the Tree window, and select the subset named
Frame.
Switch to the Quality window and click Fixed part
().
Press the Esc key to remove all selected parts.
Click Add selected parts of tree ().
Click Depenetrate Auto ().
Note: Only the nodes of the seat cushion are moved. The seat parts
are fixed.
Click Close twice.
Click Export to save the model.
Create the Interface between Dummy Feet and Floor
Creation of an interface between dummy feet and the floor.
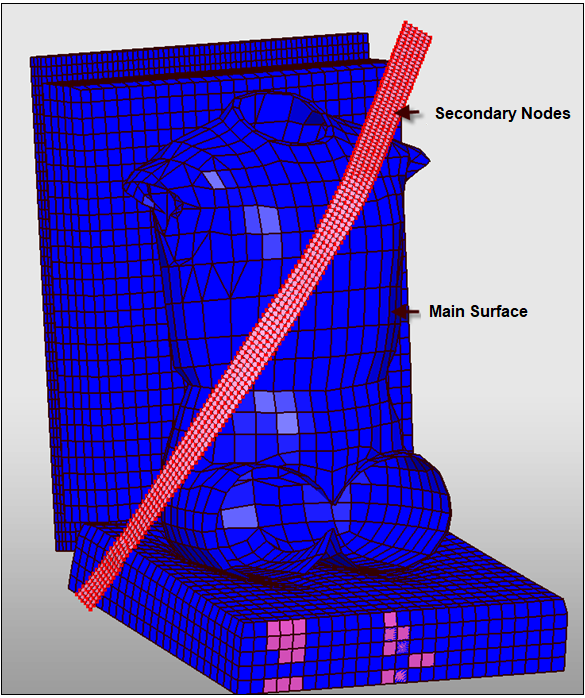
Right-click in the Contact list and select Create New > Tied with void (Type 10).
Set the dummy feet as secondary nodes.
Set the floor as main surface.
Figure 22.
Set the interface Title to Feet - Floor.
Set Gap for impact activation to 3.0 mm.
Click Save > Close.
Click Export to save the model.
Modify Seat Cushion Mesh
Modifying the seat cushion mesh to conform to the dummy using the Seat Deformer tool.
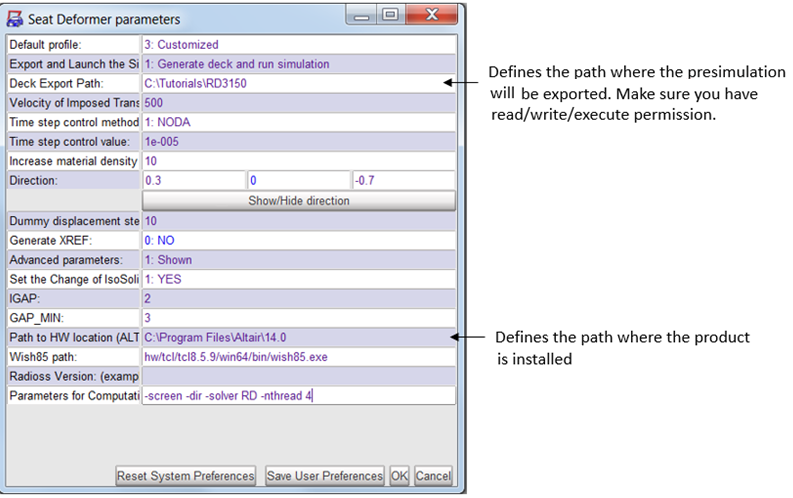
Edit the Pre-simulation Settings
To remove the intersection between the dummy and the set, HyperCrash will generate a Radioss
input deck and run a pre-simulation step. The settings for the pre-simulation are
defined in the menu Option > Presimulation Parameters (for Seat Deformer). For this exercise, modify the settings, as shown below: Figure 23.
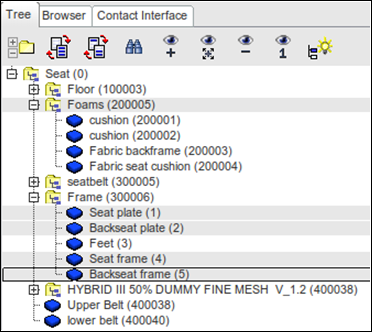
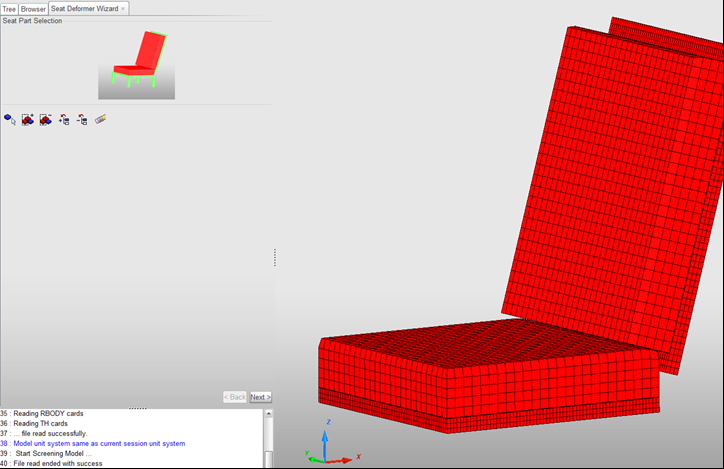
Select the Seat Parts
Click the Tree tab and select
Foams assembly, Seat plate,
Backseat plate, Seat frame,
and Backseat frame, as shown below.
Figure 24.
Click Safety > Seat Deformer > Pre-simulation (new) and click Add selected parts of Tree
().
Figure 25.
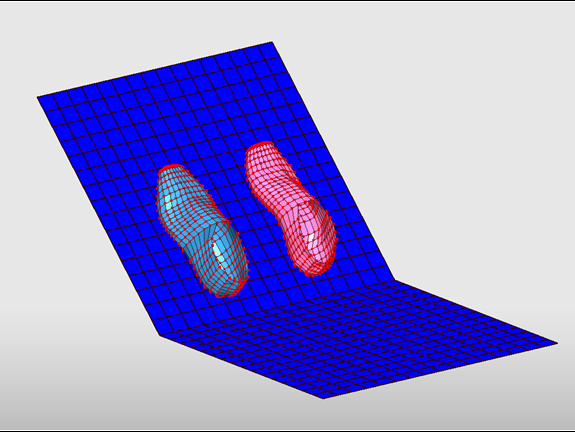
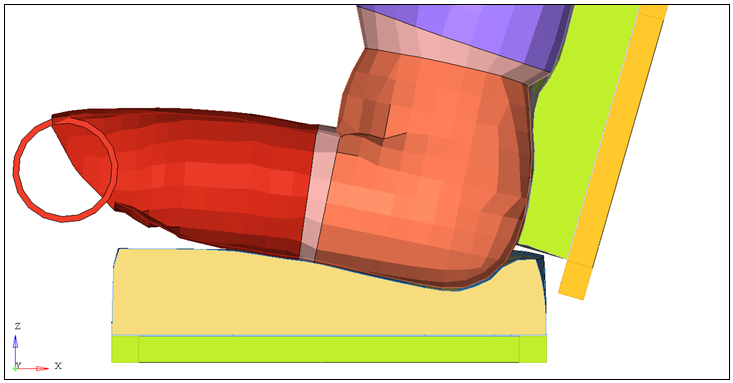
Review the Results and Apply the Deformed Shape
Once the pre-simulation is completed, review the results in by opening the
.h3d file. Create a cut section in the middle of the
dummy and verify that the dummy does not intersect/penetrate the seat
foam.
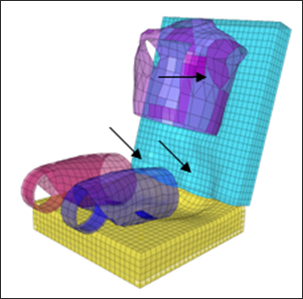
Figure 26.
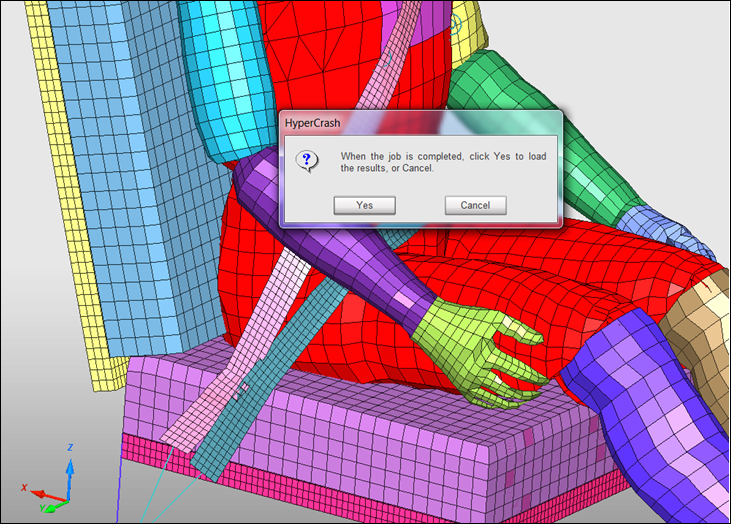
If an intersection/penetration does not exist, go back to the window and load
the results by clicking Yes in the dialog.
When the job is completed, click Yes to load the
results.
You can also load the results by clicking File > Import > h3d node coordinates, then click Yes to the
message Warning: all the nodes coordinates will be replaced by the ones
found in the selected .h3d file. Figure 27.
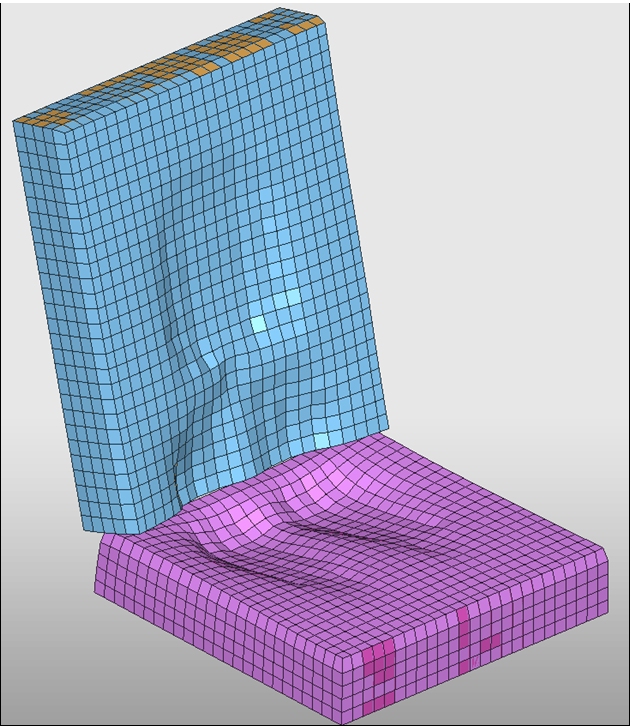
Below is the deformed shape for the seat foam after the
pre-simulation. Figure 28.
Check Initial Penetration between Seat and Dummy
After the seat deformation, check if any initial penetrations remain between the seat and
the dummy.
Click LoadCase > Contact Interface to open the Contact Interface tab.
Select interface Dummy - Seat.
Click Check penetration selected interfaces (). Penetrations exist between
the seat beam and the dummy.
Click Select All ().
Click Highlight by Vector ().
Figure 29.
Click Fixed part () .
Press the Esc key to remove all selected parts.
Click Fixed part () and then select the displayed parts of the
dummy.
Click Depenetrate Auto ().
Only the nodes of the seat cushion are moved. The parts of the dummy are
fixed.
Click Close.
Click Export to save the model.
Loadcase Setting
Update Initial Velocity
Update the initial velocity defined in the model to include all the nodes in the model.
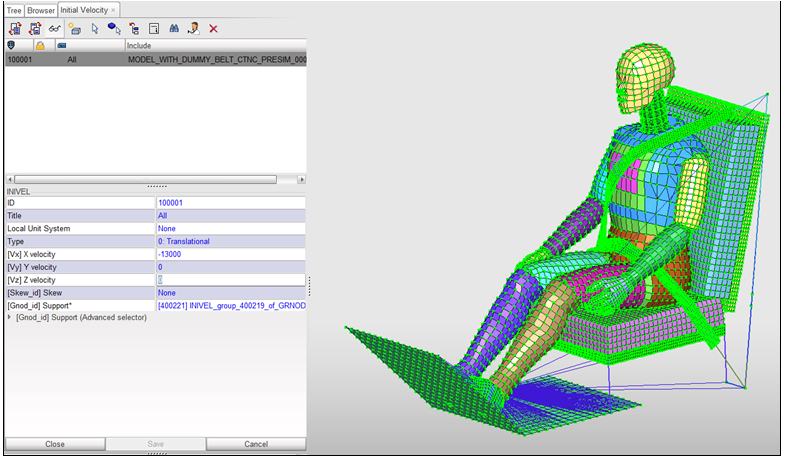
Click LoadCase > Initial Velocity to open the Initial Velocity tab.
Select the initial velocity All in the list.
Click See selected initial velocity ().
Right-click in the Support entry box and click Select in graphics > Add all nodes ().
Change [Vx] X Velocity from -10000 to
-13000 mm/s.
Figure 30.
Click Save > Close.
Click Export to save the model.
Update Imposed Velocity
Update the imposed velocity on the floor to decelerate the car.
Click LoadCase > Imposed > Imposed Velocity.
Select Imposed velocity in the list.
Click See selected imposed velocity ().
The floor rigid body is displayed on the screen. The imposed velocity is
defined on its main node. Figure 31.
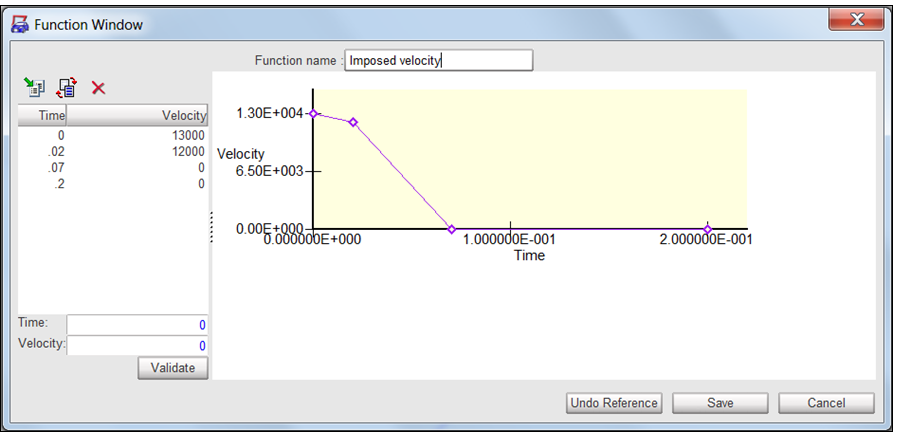
Right-click the Time Function entry box and select
Edit function. Check if the initial value of the
function is the same as the initial velocity.
Figure 32.
Click Save > Close.
Click Export to save the model.
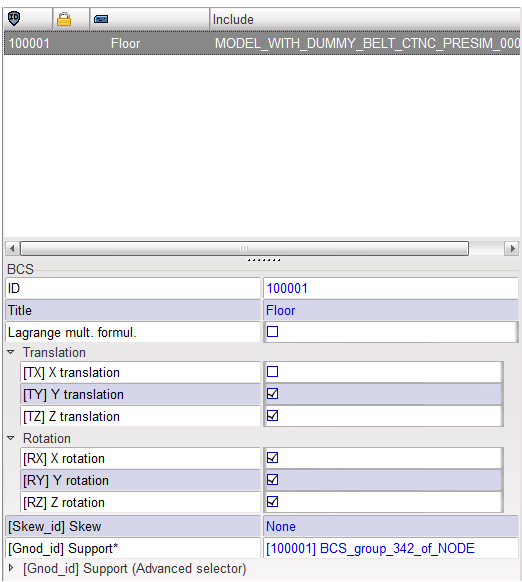
Set Boundary Conditions
To simulate the Sled Test, you need to constrain all degrees of freedom on the floor except X-direction.
Click LoadCase > Boundary Condition.
Select Floor in the list.
Click See selected boundary condition ().
The floor rigid body is displayed on the screen. The boundary condition
is defined on its main node.
Verify that the degree of freedom for Ty, Tz, Rx, Ry, and Rz are fixed.
Figure 33.
Click Save > Close.
Click Export to save the model.
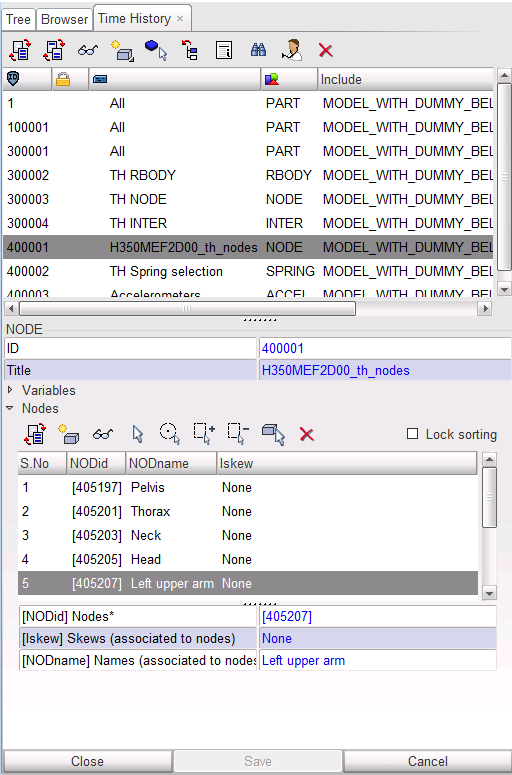
Set Time History Data
Select Nodes
Click Data History > Time History.
Select the node group H350MEF2D00_th_nodes.
Click See selected th ().
These are the nodes of the dummy rigid bodies.
For the first 5 nodes of the group:
Select the node in the list.
Click See selected node ().
Enter a name in the field Node name, as shown in the table.
Click Ok.
Figure 34.
When all labels are defined, click Save > Close.
Click Export to save the model.
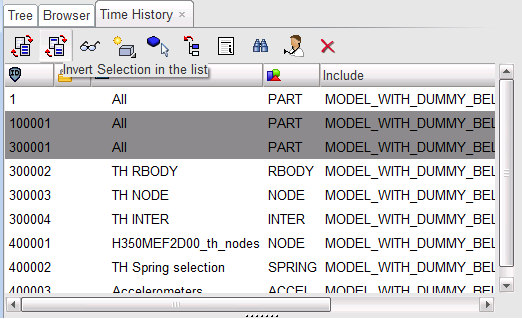
Select Parts
Click Data History > Time History.
Select the second and third part
group on the list.
Figure 35.
Click Delete selected th ().
Click Yes to the question in the main window.
The selected parts groups are deleted from the model.
Select the remaining part group in the list.
Click See selected th ().
Click the Tree tab and select
the root of the
tree.
Figure 36.
Switch back to the Data History panel and click Add parts by tree
selection.
Figure 37.
Click Save.
Click Export to save the model.
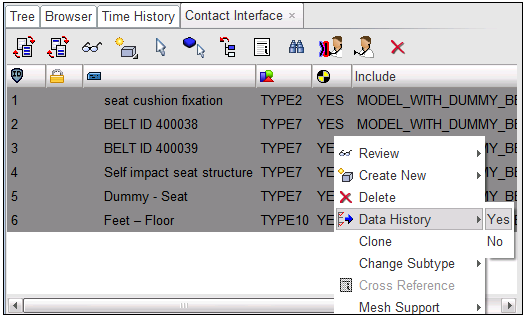
Add Interfaces
Add all interfaces to Time History.
Click LoadCase > Contact Interface to open the Contact Interface tab.
Select all interfaces in the list.
Right-click and select Data History > Yes.
Figure 38.
Clean the Model
Go to Quality Module.
Select Check All Solver Contact Interfaces.
Make sure there are no intersections and initial penetrations; if so, fix them.
Click Close.
Go to Mesh Editing and clean so that all the unused
materials and properties are removed.
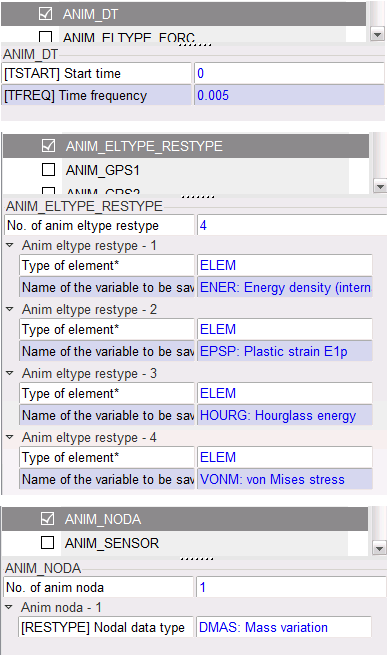
Create Control Cards and Export Model
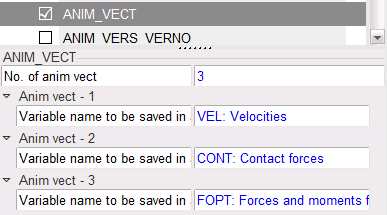
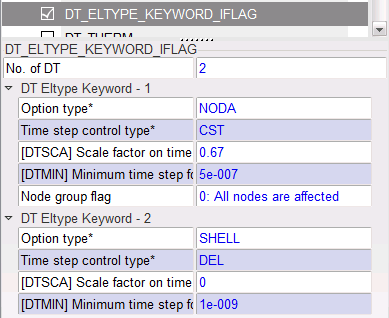
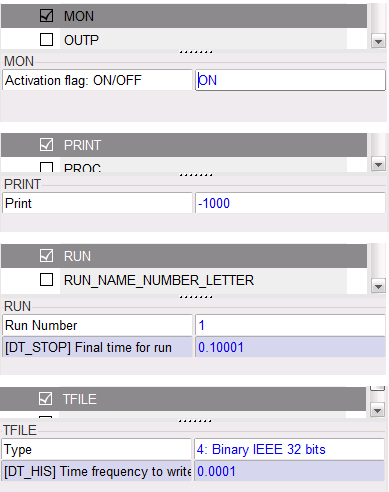
Click Model > Control Cards to create the Control Cards in the images below.
Note: The /DT/SHELL/DEL command is used to delete some of the
rigid body shells to allow the dummy’s joints to bend during the
simulation.
Figure 39.
Figure 40.
Figure 41.
Figure 42.
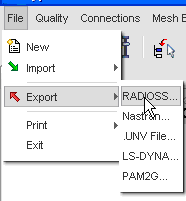
Click File > Export > Radioss.
Figure 43.
Enter a name for the model in the file output window and click
OK.
Figure 44.
Write relevant information regarding your model in the Header window.
 ).
).
 and then Left
View (F11).
and then Left
View (F11).
 Add nodes by box
selection and select all the nodes of the seat, feet and the
anchorage points of the seatbelt.
Add nodes by box
selection and select all the nodes of the seat, feet and the
anchorage points of the seatbelt.
 Add/Remove a face and pick one
element on each part of the frame facing the cushion. Then select the
Expand option on the lower right corner to pick
select all.
Add/Remove a face and pick one
element on each part of the frame facing the cushion. Then select the
Expand option on the lower right corner to pick
select all.
 at the top of the interface
panel, to check the interface.
at the top of the interface
panel, to check the interface.

 ).
).
 ) and
select three nodes, as shown in the following image (red dots).
) and
select three nodes, as shown in the following image (red dots).
 ) and
select the parts: torso, pelvis,
upper legs, and the seat cushion
fabric, as shown in red in the image.
) and
select the parts: torso, pelvis,
upper legs, and the seat cushion
fabric, as shown in red in the image.
 ) and select the material file
BELT.mat you saved to your working directory.
) and select the material file
BELT.mat you saved to your working directory.
 ).
).
 ).
).
 .
.
 ).
).
 ).
).
 ).
).
 ).
).
 ).
).