新機能
MotionSolve 2023の新機能について説明します。
Altair Multibody Solutions 2023 リリースノート
主な特長
Altair Multibody Solutions 2023リリースには、MotionViewおよびMotionSolveの以下の機能強化およびバグ修正が含まれています:
- 新しいMotionViewインターフェース
- 実行ワークフローのアップデート
- 履帯車両ソリューションのアップデート:
- 履帯用軟質土壌路面ソリューション
- 軟質土壌路面の可視化の強化
- 履帯・クローラビルダーのダブルピントラックリンクオプション
- 履帯・クローラビルダーで利用可能な新しい転動体システム
- 車両ツールのアップデート
- 軟質土壌路面用の新しいユーザー定義障害物
- フルビークル走行イベントのエンティティエディター対応
- フルビークルのキネマティック・コンプライアンス解析イベント
- オートマチック・トランスミッション・パワートレインが車両ライブラリに追加
- 新しいUTVと履帯APCのサンプル車両モデル
- 軟質土壌路面の可視化の強化
- モデル・ユーティリティのアップデート
- 機械ツール拡張機能
新機能
- _linz.H3Dへの複素節点変位フォーマットでの線形解析結果の書き出し
- MotionSolveは、モデル構成、静的平衡構成、過渡シミュレーション終了時の構成など、さまざまな構成におけるモデルの線形化バージョンのスタディを可能にし、包括的な解析機能を提供します。モデルを線形化することにより、MotionSolveは固有値と固有モードを正確に計算します。以前のバージョンでは、固有モードはHyperViewで可視化するために、H3Dフォーマットで過渡応答の結果として保存されていました。しかし、最新バージョンでは、MotionSolveは複素節点変位を*_linz.h3dという名前のH3Dファイルに保存します。この改良により、OptiStructなどの他のソルバーと同様に、HyperViewでモーダルアニメーションをシームレスに実行し、一貫したワークフローとインターフェースを提供するNVH Director機能を活用できるようになりました。
- 新しいMotionViewインターフェイス
- 本バージョンから新しいMotionViewインターフェースのみとなります。クラシックMotionViewは廃止され、このバージョンから使用できなくなりました。すべての機能は、上部の大きなリボンによって駆動される新しいインターフェースに移行されました。リボンアイコンを使用して、ガイドバー、マイクロダイアログ、ダイアログ、およびエンティティエディターによって支援されるモデル構築ワークフローを有効にします。
-
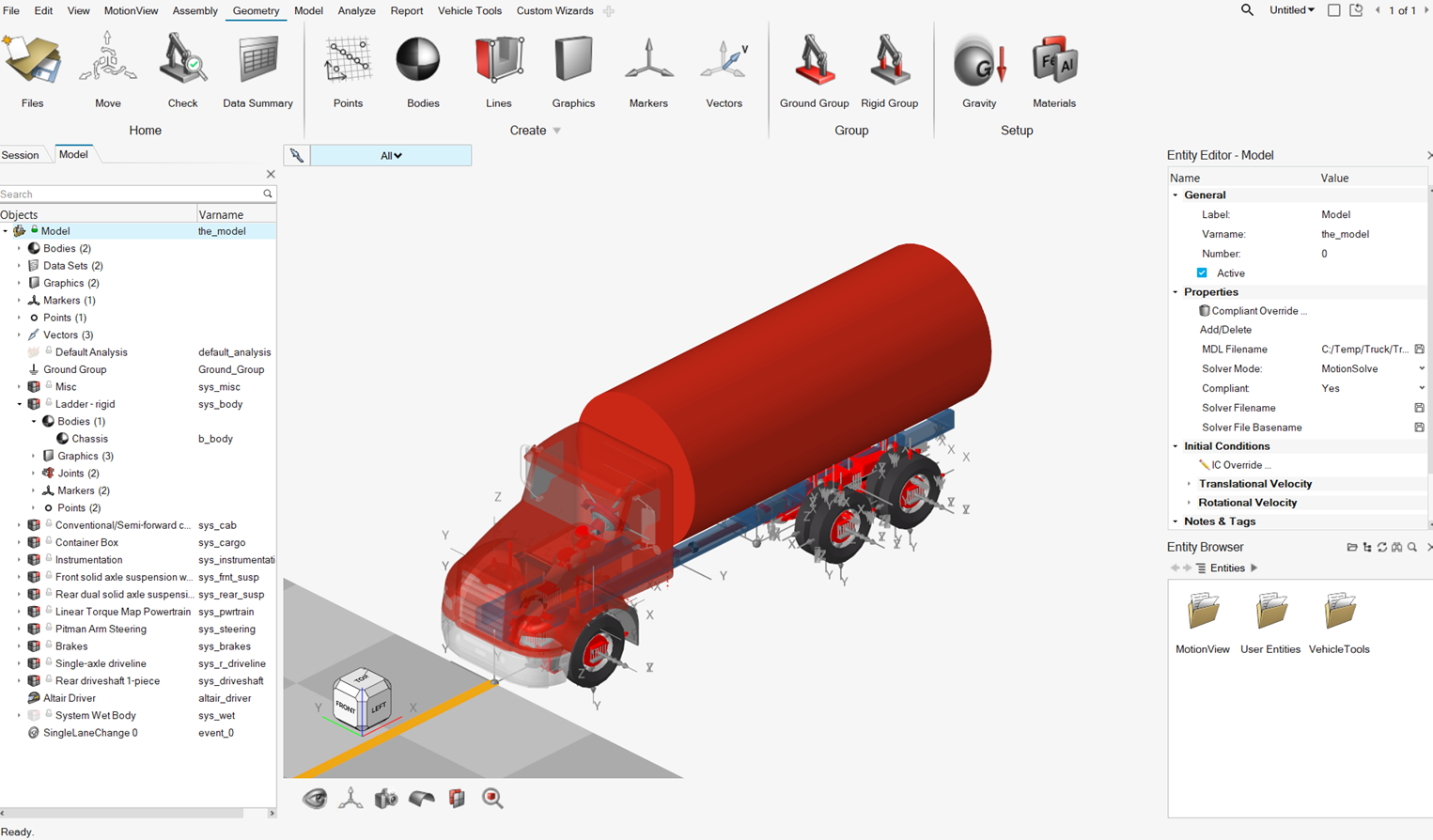
図 1. - エンティティエディター
- 次のエンティティが新しいインターフェースのエンティティエディターに追加されました:システム、アナリシス、データセット、テンプレート、フォーム、 FMU、General Constraints、Outlineグラフィックス、およびソルバー 配列。
- 実行ワークフローのアップデート
- モデルを解析するためのインターフェースが改良されました。
- 各アナリシスインスタンスは、個別にシミュレーション設定を行うことができるようになりました。例えば、解析タイプ、終了時間、積分器の設定は、エンティティエディターを通じて、アナリシス毎に個別に変更し、保存することができます。
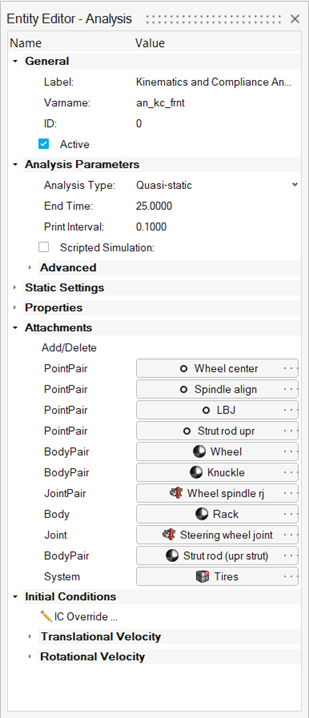
図 2. - デフォルトアナリシスインスタンスが利用可能になりました。モデルに他のユーザー定義のアナリシスが含まれていない場合は、このデフォルトアナリシスのエンティティエディターを使用してシミュレーションパラメータを設定します。
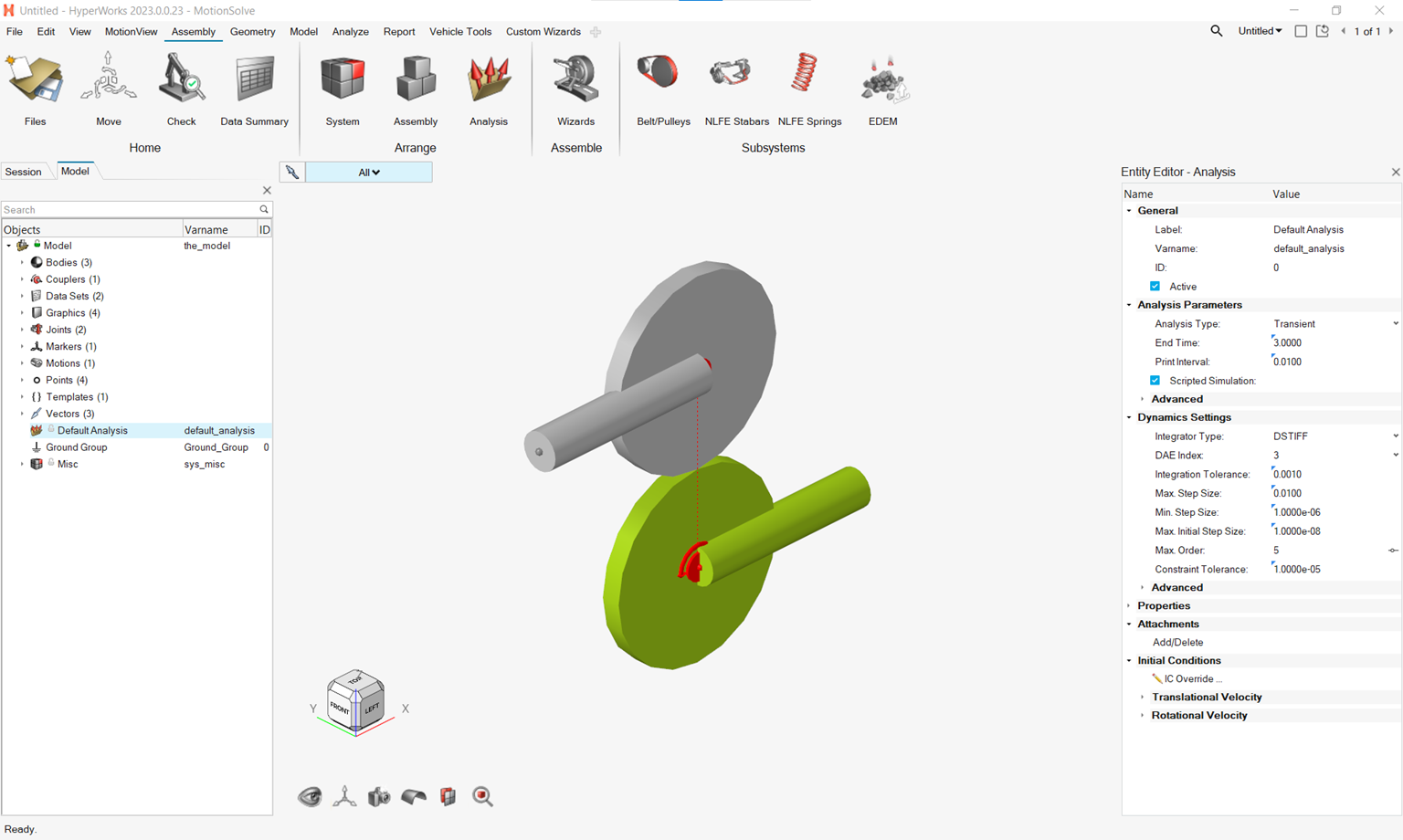
図 3. - 実行設定ダイアログが変更されました。
- 解析タイプとその関連フィールドは含まれなくなりました。
- 出力ディレクトリは、このダイアログで前もって表示されます。
- 解析設定は"グローバル設定"に名称変更されました。
- 実行名で作成される独立した実行フォルダは作成されなくなりました。その代わりに、解析ディレクトリ名に実行名を付加した名前の実行ファイルが出力ディレクトリに作成される。
- 実行履歴はモデルに基づいて整理されています。
- 計算実行中のライブアニメーションで、 弾性体の変形表示が可能になりました。
- 結果情報は解析ごとに保存されます。ライブアニメーションで解析した複数のアナリシスを含むモデルでは、アナリシスをアクティブにし、結果レビューコンテキストを使用することで、アナリシス毎の結果をアニメーション化することができます。
- 各アナリシスインスタンスは、個別にシミュレーション設定を行うことができるようになりました。例えば、解析タイプ、終了時間、積分器の設定は、エンティティエディターを通じて、アナリシス毎に個別に変更し、保存することができます。
- 履帯用軟質土壌路面ソリューション
- Altair Soft Soilモデルが履帯ソリューションでも使用可能になりました。これにより、粘土、乾燥砂、レゴリスなどの圧縮性のある路面上での履帯車両の動的挙動をシミュレーションできます。タイヤと履帯の両方のモデルを同じ軟質土壌地形でシミュレーションすることができるため、履帯とタイヤの接地圧による土壌の圧縮の影響を捉えることができます。
-
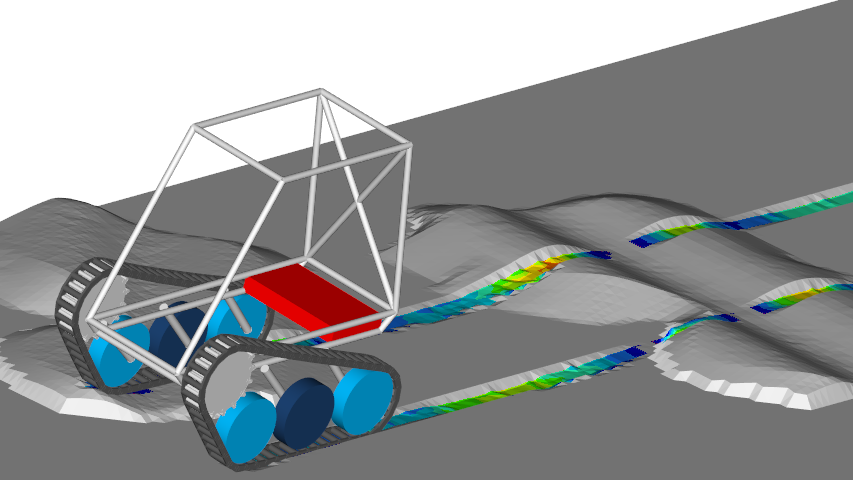
図 4. 重粘土の軟質土壌路面を走行する履帯車両 - 履帯・クローラビルダーのダブルピントラックリンクオプション
- 車両ツール>履帯・クローラビルダーに、ダブルピントラックリンクを使用して履帯システムを構築するための新しいトラックリンクオプションが用意されています。多くの軍用車両の構成に存在するダブルピントラックリンクは、トラックリンクが他の転動体システムと相互作用する一方で、通常はスプロケットと接触しているコネクターボディに結合されています。
-
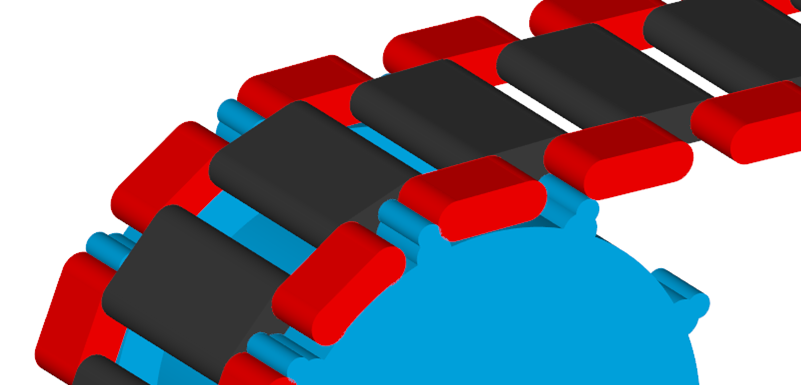
図 5. MotionView でのダブルピントラックリンクの表現 - 履帯・クローラビルダーで利用可能な新しい転動体システム
- 履帯・クローラビルダー>転動体システムに2つの新しい転動体システムが含まれています。ダブルホイールとダブルスプロケットにより、履帯システムのコンポーネントをよりよく表現できます。
- ダブルスプロケットとダブルホイール回転システム:
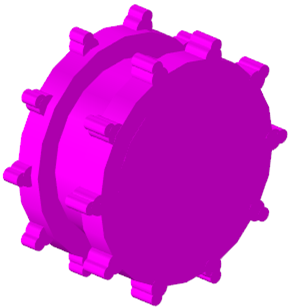
図 6. ダブルスプロケットシステム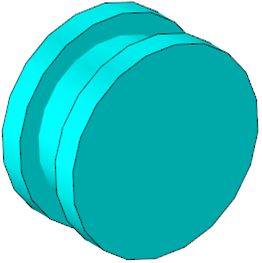
図 7. ダブルホイール回転システム - 軟質土壌路面用のユーザー定義障害物
- 利用可能な軟質土壌路面用の障害物のリストに加え、新たにユーザー定義の障害物が利用可能になりました。ユーザー定義の障害物では、あらゆる幾何学的形状を軟質土壌路面の障害物として表現できます。これは、軟質土壌路面ファイルのCUSTOM_OBSTACLEブロックに追加されたポイントクラウドデータ(PCD)路面として定義されています。PCD道路は、データポイントのクラウドまたはHyperMeshで作成された三角形メッシュの.fem ファイルを使用して作成することができます。
-
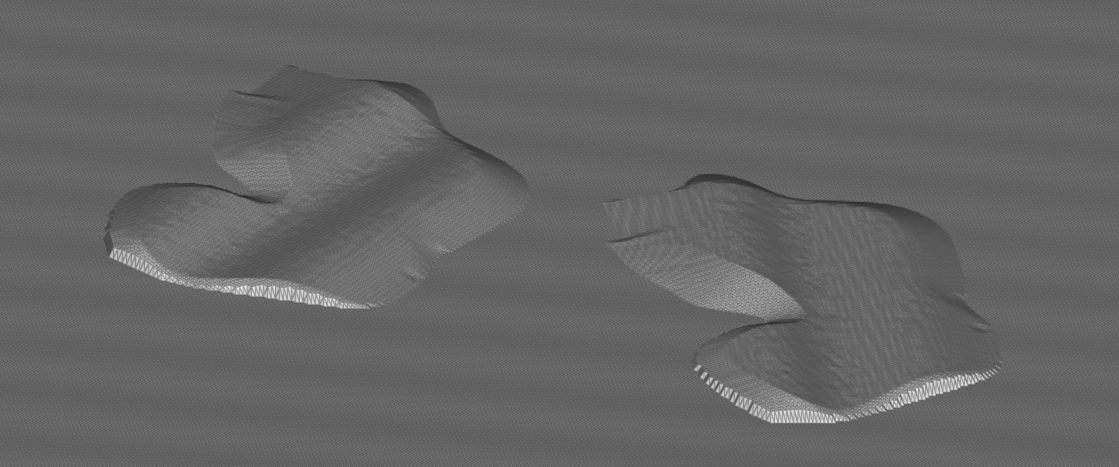
図 8. MotionViewでのユーザー定義障害物の例 - エンティティエディターを使用したフルビークル走行イベント
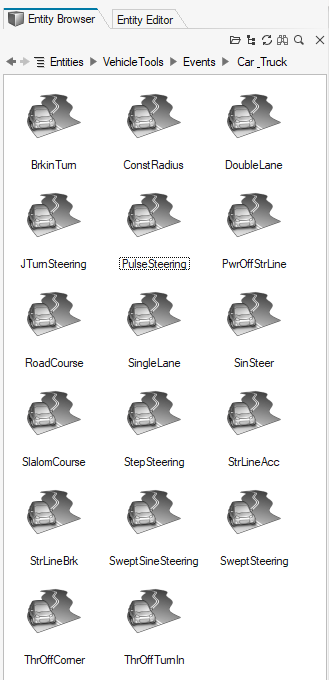
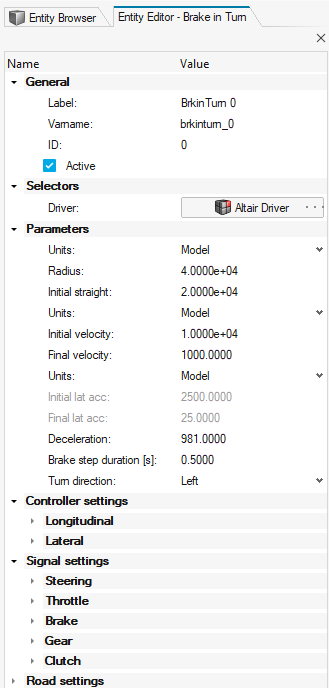
- Car および Small Trucks、Heavy Trucks、Two-Wheeler ライブラリで利用可能なフルビークル車両イベントが、車両ツール拡張機能のエンティティブラウザ から追加できるようになりました。
-
表 1. フルビークル車両イベントのワークフロー。Eventsフォルダーの場所、Eventsのリスト、Brake in Turnイベントのエンティティエディター。 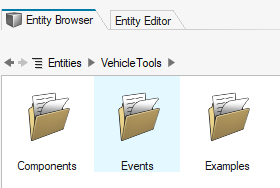
- フルビークルのキネマティック・コンプライアンス解析
- 新しいキネマティック・コンプライアンス解析イベントは、フルビークルモデルで利用でき、車両のサスペンション特性の設計と検証に使用できます。このイベントは、9つのサブセット解析(乗り心地、ロール、横力、縦力、アライメントモーメント、ステアリング)で構成され、必要に応じて無効にすることができます。
-
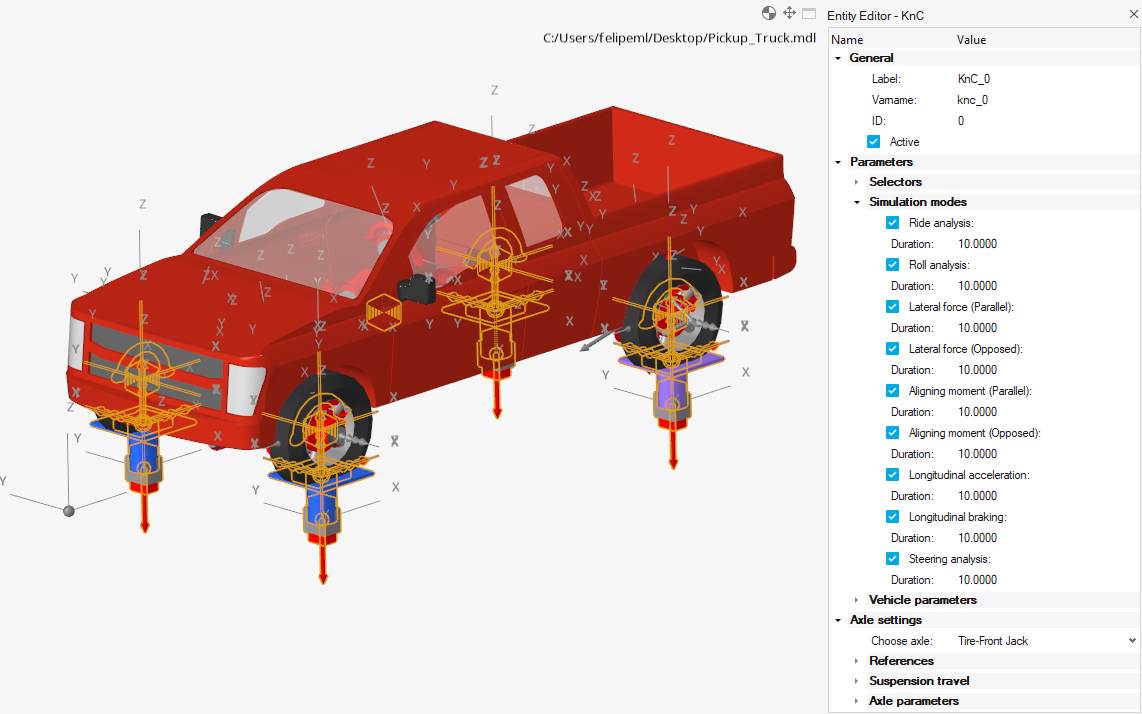
図 9. ピックアップトラックのモデルにおけるキネマティック・コンプライアンス解析イベント - 車両ライブラリのオートマチックトランスミッションパワートレイン
- MotionView の自動車・小型トラック車両ライブラリには、オートマチックトランスミッションを搭載した内燃(IC)エンジンの新しいパワートレイン・モデルが含まれています。オートマチックトランスミッションのパワートレインを選択するオプションは、Altair Driverでフルビークルモデルを作成する際に、パワートレインの選択で利用できます。
-
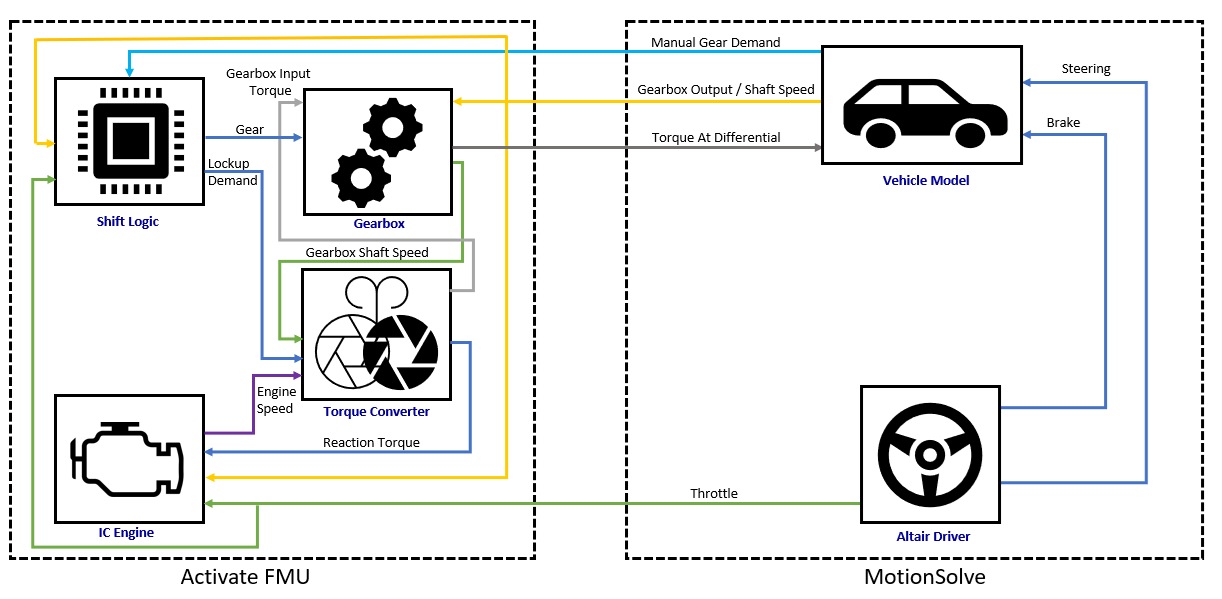
図 10. Altairドライバーおよび車両とオートマチックトランスミッションのパワートレイン接続 - 新型UTVおよび履帯APCのサンプルモデル
- 車両ツール拡張機能のExample Modelsに2つの新しいモデルが追加されました。UTVモデルは、オフロードシミュレーションイベントに適した新しいサスペンションタイプとパラメータを含みます。履帯APCのサンプルモデルでは、履帯システムに新しいダブルピントラックリンクを使用し、車両が軟質土壌路面の複数の障害物を乗り越えるシミュレーションを行えます。
-
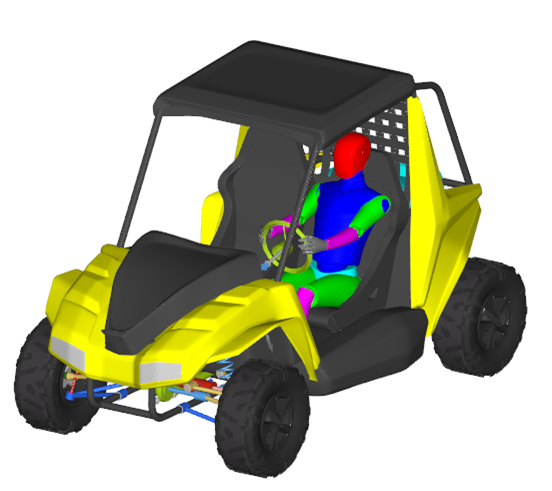
図 11. UTVと履帯APCのサンプルモデル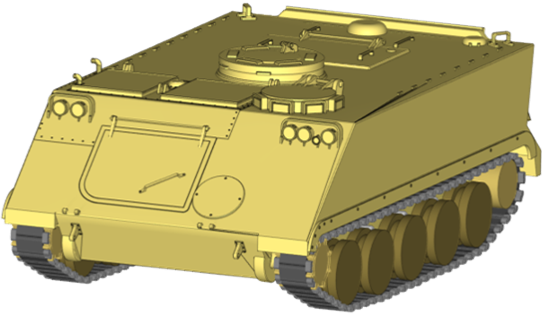
図 12. - 機械ツール拡張機能
- 機械コンポーネントの構築と解析のために設計された新しいMotionView拡張機能が利用可能になりました。機械ツール拡張機能には、ギアボックス、ドライブトレイン、エンジン、および同様のメカニズムを最小限の時間でモデル化するために使用できるベアリングとギアのライブラリが含まれています。
-
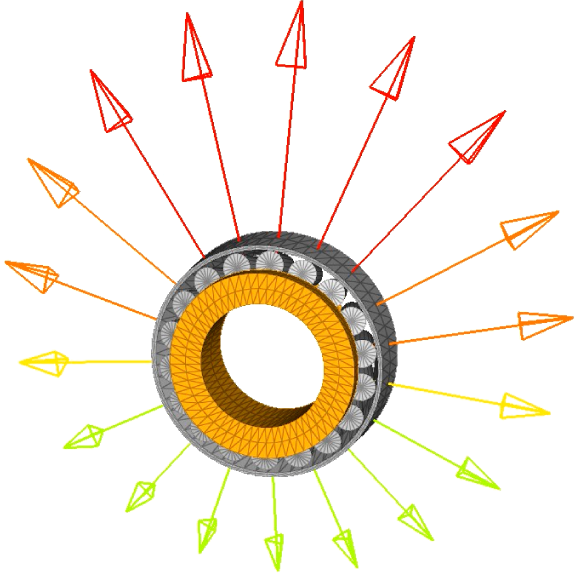
図 13. ベアリング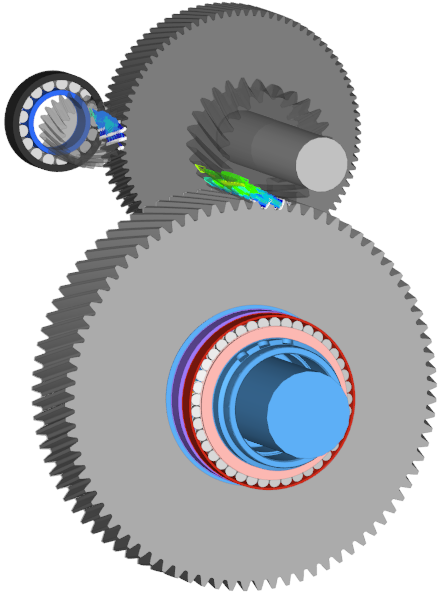
図 14. ギアアセンブリ -
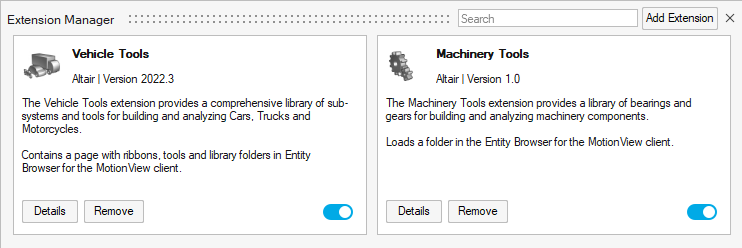
図 15. MotionViewに読み込まれた機械ツール拡張機能 - リボンヒント
- 複数のピックターゲットを持つツールや、セカンダリボンを開くツールを識別するためのリボンヒントが追加されました。ツールのアイコンとラベルの間に表示される小さなインジケーターです。ドット(.)の数はツール内の選択ターゲットの数を表します。ツールにカーソルを合わせるまで表示されないものもあります。
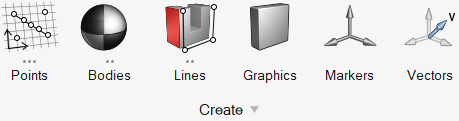
図 16.
機能強化
- MSolve APIのリファレンスガイドの刷新
- MotionSolveヘルプに詳細なMSolveリファレンスガイドが追加されました。このマニュアルでは、MotionSolveのPython APIであるmsolveの詳細な使用方法について説明します。リファレンス・ガイドには、APIの簡単な概要とスタイル規約が記載されています。APIドキュメントでは、利用可能なオブジェクト、メソッド、機能について包括的に説明しています。このマニュアルには、APIの統合パッケージであるmsolveセクションと、msolveの2つの拡張機能であるOptimizationとMachineryの3つのセクションがあります。
- _linz.mrfへの剛体ボディのトータル運動エネルギーの書き込み
- 剛体ボディのトータル運動エネルギーが_linz.mrfに書き出されます。HyperGraphでトータル運動エネルギーをプロットしたり、HyperStudyを使用して感度解析、DOE解析、最適化解析を行うことができます。
- 独立座標の総数に寄与する運動学的状態とその他の状態の区別
- MotionSolveは、運動学的な独立座標と、独立座標の総数に寄与する制御状態方程式や微分方程式などに由来するその他の状態の内訳を書き出します。
INFO: Total Number of Independent Coordinates = 1 (Kinematic DoF: 1, Other States: 0) - 軟質土壌路面可視化の機能強化
- HyperViewでの軟質土壌路面のポスト処理には、変位、塑性沈下、弾性沈下、軟軟質土壌法線応力、軟質土壌せん断応力の5つの新しいコンター出力が含まれます。これらの出力オプションを使用して、軟質土壌地形でのタイヤと履帯の動的挙動を素早く評価します。
- Update Modelユーティリティ
- 旧バージョンのHyperWorksで作成された車両モデルを更新するには、車両ツール拡張機能のUpdate Modelユーティリティを使用します。このユーティリティは、AutoEntities、AltairDriver、Eventを新しいエンティティエディターを採用したエンティティに置き換えます。
- 剛体グループコンテキストの機能強化
- 剛体グループ作成コンテキストで、複数のボディを選択する際にCtrlキーを使用する必要がなくなりました。
- ウィザードのアップデート
- ウィザードの言語には、ウィザードのページ表示させるテキストメッセージが含まれています。
解決した問題
- HTMLレポートがオンになっているときに、ログファイルにも繰り返しエネルギー分布が表示される
- ボックスと円筒面の解析的接触
- 三角メッシュコンタクトのメモリ・オーバーフロー
- ベルトプーリーツールを使用して複数のベルトプーリーシステムを作成すると失敗する
- インポートすると、ADMの外部グラフィックスは、参照されたコンポーネントではなく、すべてのコンポーネントを取得する
- 追加引用符を含むラベルを含む ADM をインポートすると、MotionView がクラッシュする
- インストール内の利用可能なスクリプトを用いたNLFEのプリロードが正しく機能しない
- ブラウザの右クリックコンテキストオプションでエンティティを追加すると、親システムの代わりにモデル内にエンティティが作成される
- ハイライトされた接触側が、解析のライブアニメーションの間リセットされない
- エンティティエディターからのファイル選択で、contact prediction用のセットファイルの読み込みが指定できない
- ライブアニメーション解析中に表示されるエラーダイアログが解除できない
- 弾性体ボディのエンティティエディター内のContact Prediction の Load Set ファイルに新しいファイルを選択できない
- ライブアニメーション中のコンプライアントジョイントに関するランタイムエラー
- DefinitionIncludeを使用したシステムを含むモデルのスナップショットMDLが セットステイトメントで破損し、MDL のロード中にエラーが発生する
- 結果表示モードで、エンティティのエンティティエディターが空白になる
- エンティティエディターからマルチポイントコレクタをアクティブにした状態でmodeling windowにカーソルを合わせると、ポイントピッキングモードが失われる
- 軟質土壌路面の結果をポスト処理する際に、HyperViewのオーバーレイオプションを使用してモデル結果.h3dおよび路面結果.h3dを読み込む必要がありました。路面の結果もモデル結果に含まれるよう改善されています。
- MBD-Vehicle Dynamic Toolsプリファレンスが、車両ツール拡張機能と同じ機能を含むVehicle Toolsメニューオプションを読み込む問題がありました。このメニューオプションは削除され、車両ツール拡張機能にはすべてのVehicle Tools機能が含まれます。
既知の問題
- 新しいフルビークルのキネマティック・コンプライアンスイベントの自動レポートは、それぞれ2つの車輪を持つ2軸車でのみ利用可能です。
- 剛体として定義された材料を持つ障害材料は、現在、軟質土壌路面の履帯モデルではサポートされていません。
- アセンブリウィザードから作成されたサスペンションモデル(車両のフロントエンド/リアエンド)に、タイヤエンティティが含まれるようになりました。サスペンションアナリシス(イベントリボンからアクセスできるタスクウィザード)が更新され、タイヤシステムがアタッチメントとして追加されました。MotionViewで、MotionViewの古いバージョンで作成されたサスペンションモデルをロードし、アナリシスを追加しようとすると、タイヤアタッチメントの解決に失敗します。これを回避するには、アナリシスを追加した後、Tiresのアタッチメントを削除し、ソルバーのコマンドラインを含むテンプレート内のタイヤ力を無効にするステートメント(<Deactivate/>)を削除します。