wagonwheel
This realization creates RBE2 elements for the body, and projects and connects to the hole edge nodes with RBE3 elements.
Restriction: Available in Nastran and OptiStruct.
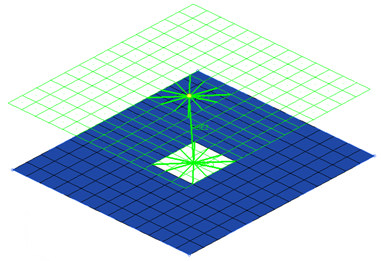
Figure 1.
This realization creates RBE2 elements for the body, and projects and connects to the hole edge nodes with RBE3 elements.