OS-T: 1910 Dynamic Analysis of a Slider Crank with Flexible Connecting Rod
In this tutorial you will work with a slider crank model, which consists of a rigid crank, a flexible connecting rod, and a rigid sliding block. The objective of this analysis is to determine the deformation and stress of a flexible connecting rod under the high speed motion of the system.
This tutorial includes the creation of PRBODY (rigid body definition), PFBODY (flexible body definition), and JOINT in HyperMesh.
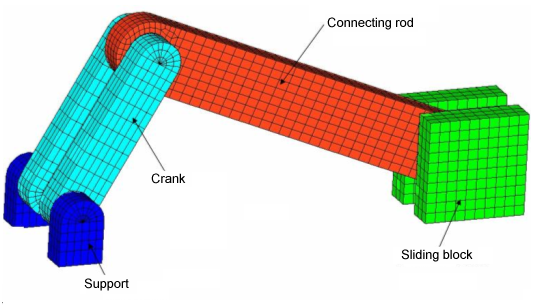
Figure 1.
Launch HyperMesh and Set the OptiStruct User Profile
Open the Model
Set Up the Model
Create PRBodies
- From the Analysis page, click the bodies panel.
- Select the create subpanel.
-
Define PRBODY for the support component.
- In the body= field, enter support.
- Click type= and select PRBODY.
- Using the props selector, select support.
- Click create.
-
Define PROBDY for the crank component.
-
Using the nodes selector, select the node (ID 25231) at the center of
RBE2 spider between connecting rod and crank.
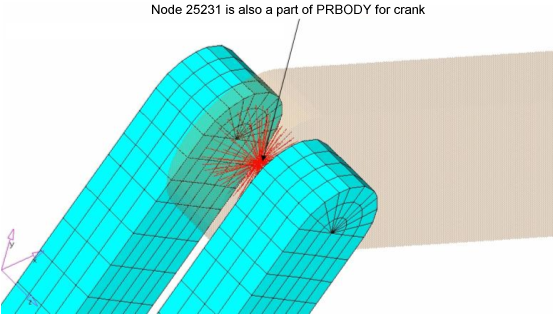
Figure 2.
-
Using the nodes selector, select the node (ID 25231) at the center of
RBE2 spider between connecting rod and crank.
-
Define PROBDY for the block component.
-
Using the nodes selector, select the node (ID 25232) at the center of
RBE2 spider between connecting rod and block.
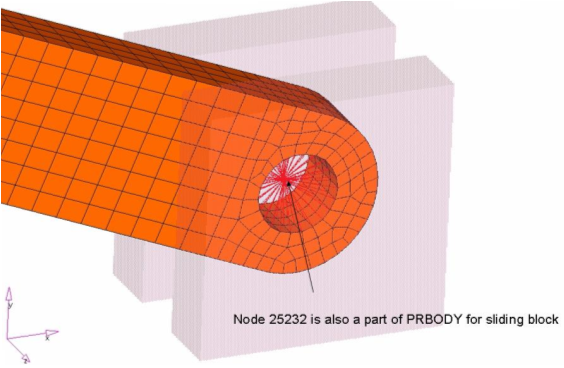
Figure 3.
-
Using the nodes selector, select the node (ID 25232) at the center of
RBE2 spider between connecting rod and block.
- Click return.
Create Flex Bodies (PFBODY)
-
Using the elems selector, select two RBE2 elements that are inside a hole on
the connecting rod.
Tip: You could also use 'elems by id' and input the IDs 18795 and 18796 to select the two RBE2 elements.
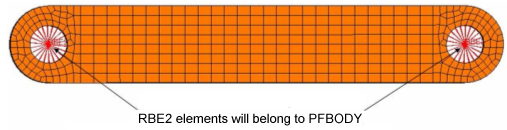
Figure 4. -
Toggle number of modes to nmodes=, and enter
10.

Figure 5.
Create Joints
| Type of Joint | Removes Translational dof | Removes Rotational dof | Removes Total Number of dof |
|---|---|---|---|
| Revolute | 3 | 2 | 5 |
| Fixed | 3 | 3 | 6 |
| Translational | 2 | 3 | 5 |
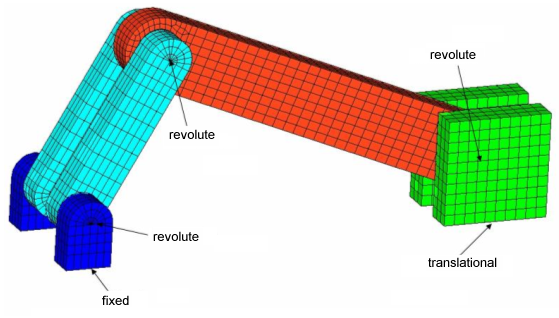
Figure 6.
-
Create the fixed joint between ground and support.
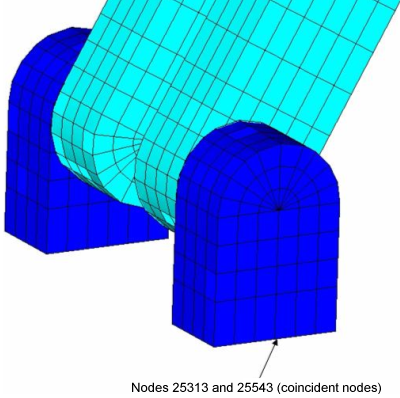
Figure 7. -
Create the revolute joint between support and crank.
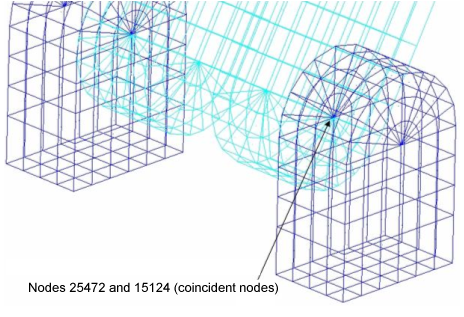
Figure 8. -
Create the revolute joint between the crank and connecting rod.
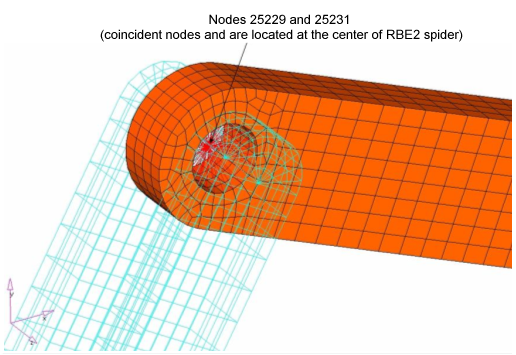
Figure 9. -
Create the revolute joint between the connecting rod and sliding block.
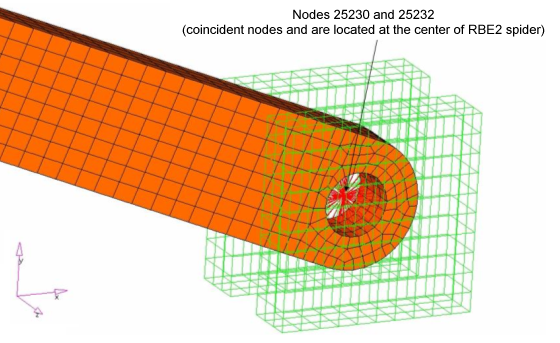
Figure 10. -
Create the translational joint between the sliding block and ground.
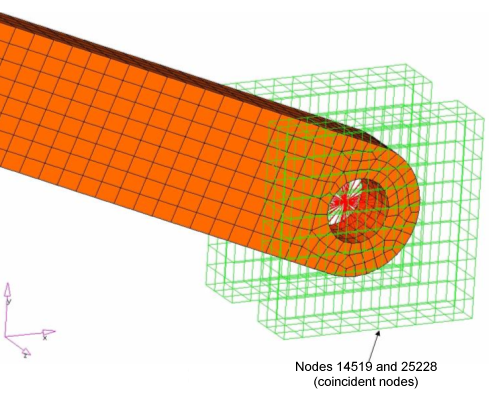
Figure 11.
Create DTI, UNITS
-
Define the unit system, as shown in Figure 12.

Figure 12.
Create Load Collectors
In this step you will create the gravity force that applies to the model and MBSIM Bulk Data card, which is to specify the parameter for multibody simulation.
-
Input the values as illustrated below.
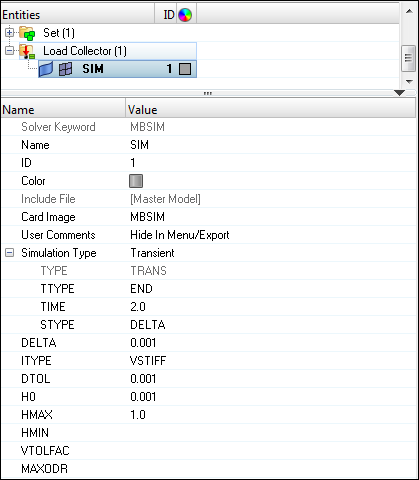
Figure 13. -
Create another load collector.
-
Input the values as illustrated below.
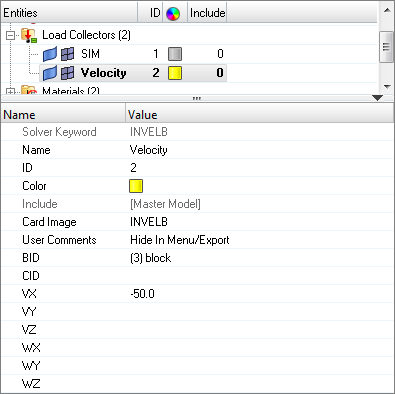
Figure 14.
-
Input the values as illustrated below.
Create Load Steps
- In the Model Browser, right-click and select from the context menu.
- For Name, enter Dynamic.
- Set Analysis type to Multibody dynamics.
-
Define MBSIM.
- For MBSIM, click .
- In the Select Loadcol dialog, select SIM and click OK.
-
Define INVEL.
- For INVEL, click .
- In the Select Loadcol dialog, select Velocity and click OK.
Submit the Job
-
From the Analysis page, click the OptiStruct
panel.
Figure 15. Accessing the OptiStruct Panel
- slider_crank_complete_mbd.abf
- Binary plotting file.
- slider_crank_complete_mbd.h3d
- Binary results file (Modal results).
- slider_crank_complete_mbd.log
- Log file from OS-Motion containing the information on the joints and markers, simulation etc., which are specific to MBD analysis.
- slider_crank_complete_mbd.mrf
- Binary results file for plotting.
- slider_crank_complete_mbd.xml
- Model file in .xml format – solver intermediate input deck.
View the Results
In this step you will view the results in HyperView, which will be launched from within the OptiStruct panel of HyperMesh.
HyperView is a complete post-processing and visualization environment for finite element analysis (FEA), multibody system simulation, video and engineering data.
-
Click the Contour panel toolbar icon
 .
.
-
Start/stop the animation using the Animation Controls in the panel next to the
playback controls.

Figure 16.-
Verify Animate Mode is set to
 (Transient).
(Transient).
- Click the Start/Pause Animation icon to start the animation.
- With the animation running, use the bottom slider bar to adjust the speed of the animation.
- Click the Start/Pause Animation icon again to stop the animation.
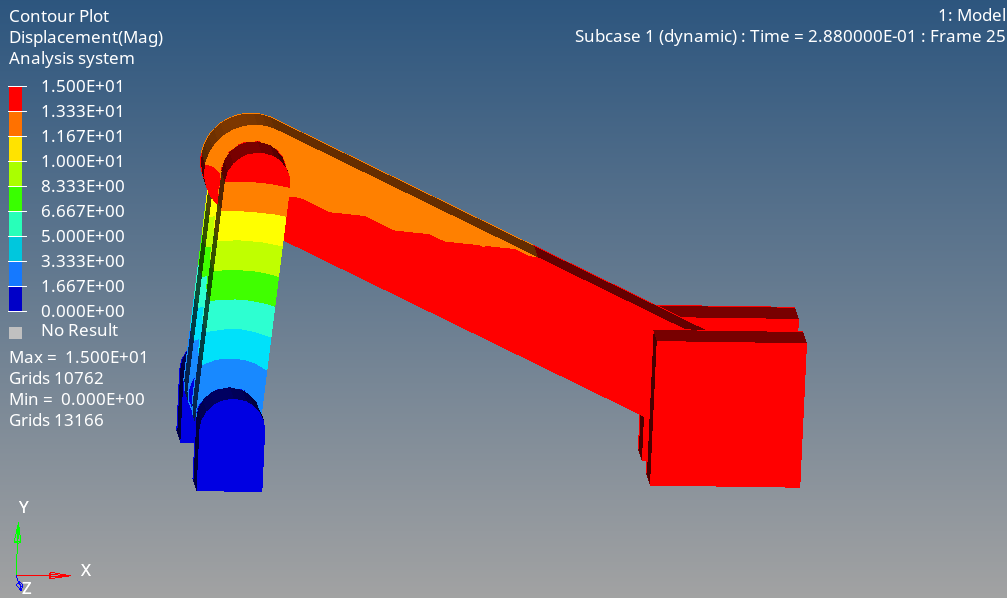
Figure 17. -
Verify Animate Mode is set to
-
Click the Start/Pause Animation icon to start the
animation.
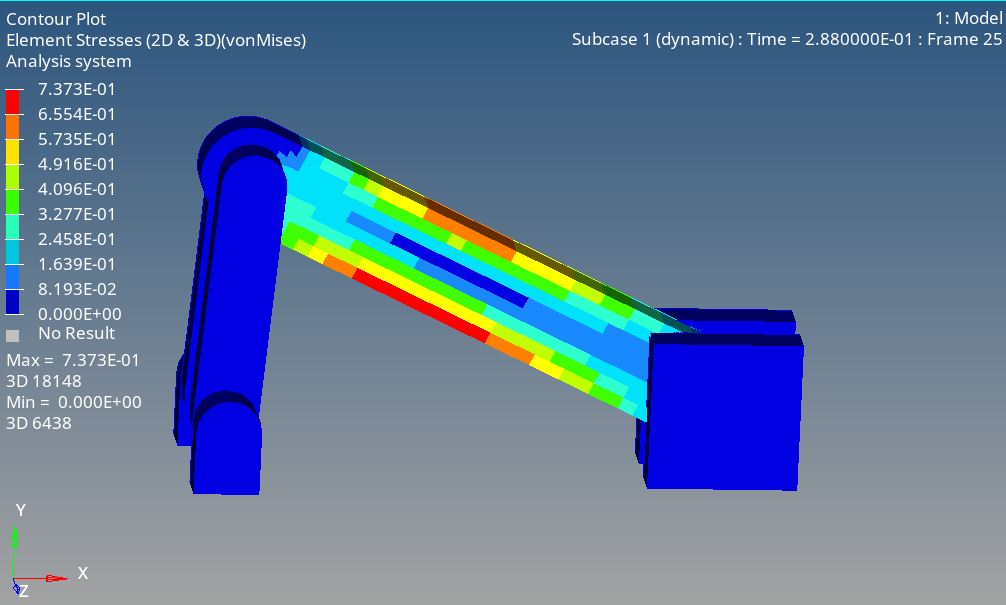
Figure 18.