Model Module#
Model Class#
The Model class serves as a container for all the entities that comprise
a MotionSolve model. Interacting with the model is possible through the numerous
methods that are listed below.
Defines a control command for one or more simulations. |
|
Generate a state space representation of the model in the form of state matrices A, B, C, and D in the desired format. |
|
Perform eigen-analysis of the model, generate eigenvalues and mode shapes. |
|
Creates plt and animation h3d files. |
|
Reset the model. |
|
Run all the valid SimulationEvent objects sequentially. |
|
Saves a snapshot of the model. |
|
Sends the model to the solver and runs the simulation. |
|
Sends the model to solver and performs a verification analysis. |
Model Entities#
The entities listed below are used to create your model. These elements co-exist
under the Model class and interact with each other in well-defined ways
in order to represent a realistic multibody system.
Defines the acceleration due to gravity along the global X, Y, and Z directions. |
|
Generates an arc graphic defined by a center marker, a radius or reference marker, and an angle. |
|
Specifies a list of instances of type |
|
Defines a straight, massless beam of uniform cross-section acting between two Markers, i and j that belong to two different bodies. |
|
Creates a rectangular box graphic. |
|
Defines a massless bushing between two Markers, i and j that belong to two different bodies. |
|
Creates a force element which establishes linear force-displacement (stiffness) and/or force-velocity (damping) relationships between markers connected by higher-pair constraints. |
|
Creates a circle graphic defined by a center marker and a radius. |
|
Performs a one-/two-way coupled Leader/Follower simulation by instantiating separate MotionSolve processes. |
|
Defines a 3-D contact force between geometries on two rigid or flexible bodies. |
|
Defines an algebraic relationship between the degrees of freedom of two or three joints. |
|
Defines a parametric curve in 3D space. |
|
Creates a curve graphic that represents a |
|
Defines a (Curve to Curve) higher pair constraint. |
|
Defines a (Curve to Surface) higher pair constraint. |
|
Creates a geometric figure with straight parallel sides and a circular cross-section along the Z axis direction of the cm |
|
Outputs data that helps you debug your simulation. |
|
Specifies a deformable curve that is made to pass through the origins of a specified set of markers, using CUBIC spline interpolation. |
|
Creates a curve graphic that represents a |
|
Specifies a deformable surface that is made to pass through the origins of a specified set of markers, using CUBIC spline interpolation. |
|
Creates a surface graphic that represents a |
|
Creates a user-defined state variable and defines a first-order differential equation that describes it. |
|
Defines a special type of solver state variable. |
|
Creates a three-dimensional figure whose plane sections are ellipses or circles and its center is the cm |
|
Specifies error tolerances and other parameters for static and quasi-static equilibrium analyses. |
|
Creates a graphic object defined using an external file. |
|
Applies a translational and rotational action-reaction force between two markers. |
|
Defines a flexible body object in MotionSolve. |
|
Creates a Functional Mock-up Interface used for Model Exchange and Co-Simulation. |
|
Creates an arrow representing a force acting on the specified entity. |
|
Applies frictional forces in a joint. |
|
Creates a graphic of a portion of a cone. |
|
Specifies a user defined general constraint. |
|
Defines a gear constraint between two bodies. |
|
Defines a general force and torque acting between two markers. |
|
Defines a set of nodal coordinates in 3D space. |
|
Defines a generic dynamic system. |
|
Defines the parameters for the animation output file. |
|
Specifies parameters that control the dynamic analysis integrator. |
|
Creates an idealized connector between two bodies. |
|
Removes degrees of freedom between two bodies by specifying conditions in which the relative translational or rotational motion can occur. |
|
Creates a graphic that connects a number of vertices with straight lines. |
|
Specifies the solver parameters that control the linear analysis. |
|
Defines a linear dynamic system. |
|
Defines an orthonormal, right-handed coordinate system and reference frame in MotionSolve. |
|
Specifies general mating constraints between geometric primitives based on |
|
Defines a general, real-valued, M x N matrix for use in MotionSolve. |
|
Defines a distributed force on a |
|
Specifies a system degree of freedom as an explicit function of time. |
|
Creates a multi-point force element which establishes linear force-displacement (stiffness) and/or force-velocity (damping) relationships between many markers. |
|
Creates a set of flexible body properties with the goal to more accurately capture the mode shapes based on Predictive Component Mode Synthesis theory. |
|
Creates line segments between the various cm |
|
Specifies if the plt, abf, mrf files are to be generated during the solver run. |
|
Defines a rigid body object in MotionSolve. |
|
Defines a penalty force whose purpose is to maintain a soft constraint in the system. |
|
Defines the inputs (type |
|
Creates a plane graphic expressed in the reference frame of the rm |
|
Creates a graphic point located at the origin of the reference |
|
Defines an entity that has mass but no inertia properties. |
|
Defines a list of outputs (type |
|
Defines a sensor between two bodies which monitors their minimum separation. |
|
Creates a container for Solver Variables that are used in generating a linear representation of a model about an operating point. |
|
Defines a (Point to Curve) higher pair constraint. |
|
Defines a (Point to Deformable Curve) higher pair constraint. |
|
Creates a contact force between a |
|
Defines a (Point to Deformable Surface) higher pair constraint. |
|
Creates a soft constraint (force) that attempts to maintain a |
|
Defines a (Point to Surface) higher pair constraint. |
|
Defines an output request entity in MotionSolve. |
|
Defines a special type of solver state variable. |
|
Defines an event sensor in the model. |
|
Defines a force or torque acting between two |
|
Defines a (Surface to Surface) higher pair constraint. |
|
Defines an event in MotionSolve and adds it to a list. |
|
Creates a three-dimensional figure whose plane sections are circles and its center is the cm |
|
Defines spline with two or three independent variables. |
|
Defines a spring damper acting between two |
|
Creates a spring damper geometry. |
|
Defines a user defined text string in MotionSolve. |
|
Defines a parametric surface element in 3D space. |
|
Creates a surface graphic that represents a |
|
Defines a transfer function as a ratio of two polynomials in the Laplace domain. |
|
Specifies parameters that control the time-domain-based nonlinear dynamic analysis. |
|
Creates a graphic object defined using 'Nodes' and 'Faces'. |
|
Defines the units for the model. |
|
Defines a user-written Post-Subroutine. |
|
Creates a user-defined (Grasub) geometry. |
|
Defines a user-written Message-Subroutine. |
|
Defines a variable in terms of a scalar algebraic equation in MotionSolve. |
|
Defines a vector force that consists of three orthogonal components. |
|
Defines a vector torque that consists of three orthogonal components. |
|
Creates a Force State Equation. |
Result Objects#
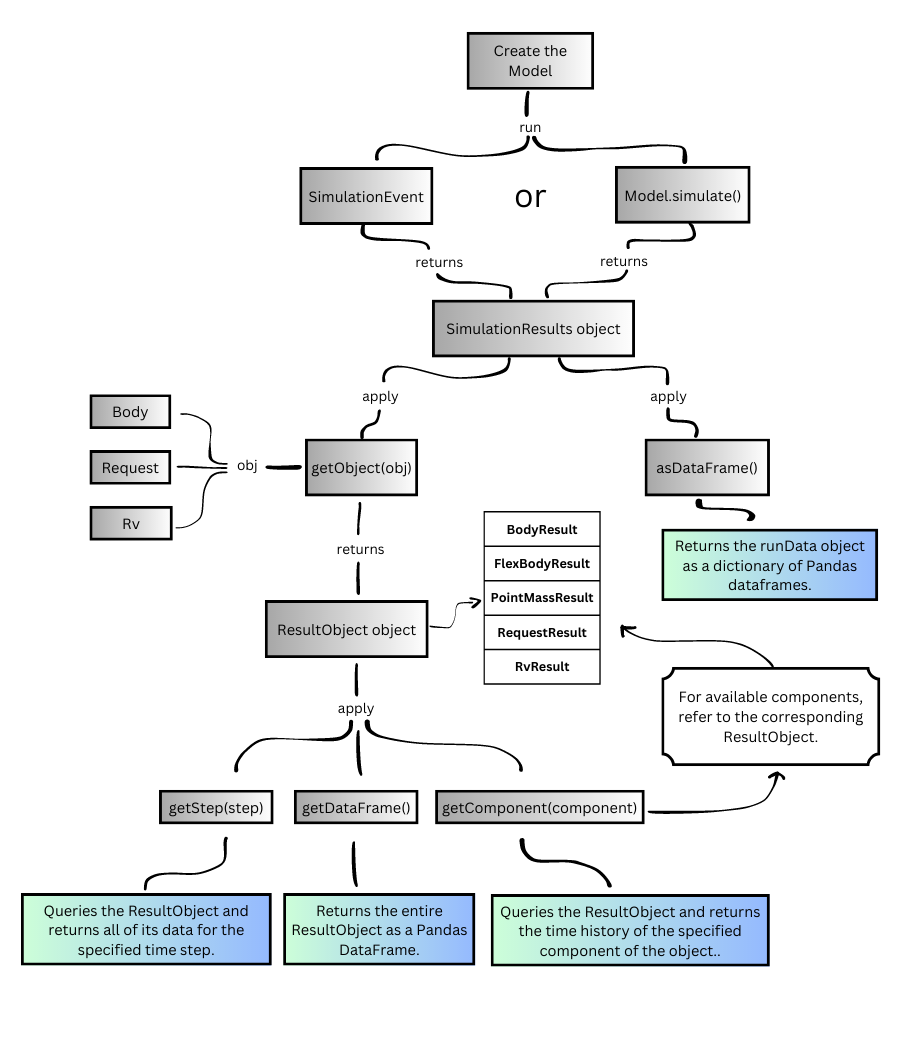
msolve has special classes and methods to extract and store the results of a simulation. These objects provide a practical and convenient platform for post-processing.
The following process map explains the different ways you can obtain the results of a simulation.
Comments
Run a
SimulationEventor use theModel.simulatemethod with thereturnResultsset to True. This instructs msolve to store the results to aSimulationResultsobject.Use the
SimulationResults.asDataFramemethod to get the results as a dictionary of Pandas dataframes, or,Use the
SimulationResults.getObjectmethod, specifying the entity whose results are to be extracted. This entity can be aBody, aRequest, or aRv. AResultObjectis created, which can be one ofBodyResult,FlexBodyResult,PointMassResult,RequestResult, orRvResult, depending on the entity.Use one of the methods
ResultObject.getStep,ResultObject.getDataFrame,ResultObject.getComponentto extract the numerical data of the entity.
Note
There is a wide range of libraries available in python for data post-processing, that can be used in conjunction with msolve.
Container object that encloses all the results from a single simulation. |
|
Base class for all the result objects of a simulation. |
|
Contains all the results associated with a single Part of the model. |
|
Contains results associated with a single FlexBody of the model. |
|
Contains all the results associated with a single PointMass of the model. |
|
Contains all the results associated with a single Request of the model. |
|
Contains all the results associated with a single Rv of the model. |
Base Classes#
Base classes are used in class derivation. They group model entities according to their functionality and they cannot be used standalone.
Base class for analysis settings objects. |
|
Base class for Body objects. |
|
Base class for command objects. |
|
Base class for constraint objects. |
|
Base class for force objects. |
|
Base class for generic modeling elements. |
|
Base class for graphic objects. |
|
Base class for reference data objects. |
|
Base class for output objects. |
Class Aliases#
Class aliases are alternative names for specific model entities.
|
alias of |
|
alias of |
|
alias of |
|
alias of |
|
alias of |
|
alias of |
|
alias of |
|
alias of |
|
alias of |
|
alias of |
|
alias of |
|
alias of |
|
alias of |
|
alias of |
|
alias of |
|
alias of |