In this tutorial, you will learn about the set-up and co-simulation of MotionSolve and EDEM through MotionView.
MotionSolve has the ability to interface with Altair EDEM, a state-of-the-art bulk material simulation
tool. EDEM is based on the Discrete Element Method (DEM)
that simulates and analyzes the behavior of bulk materials such as sand, granules,
capsules, grass, rock masses etc. For more information about this method refer to
https://www.altair.com/edem/ and
the Discrete Element Simulation in MotionSolve
topic in the MotionSolve User Guide.
This tutorial assumes minimum knowledge in both Altair’s
MotionSolve/MotionView
and EDEM.
Requirements
The following pre-requisites are necessary for a successful interaction
between MotionSolve and EDEM:
Note: It is recommended to
install EDEM in the
same location as MotionSolve (default:
C:/Program Files/Altair/2023).
If EDEM is installed in a
different location, please add
~install_location/EDEM/bin
and
~install_location/EDEM/lib to
the PATH environment variable for features such as
geometry transfer and co-simulation to work
effectively.
The steps and options described
here are for the version 2022 release of MotionView, MotionSolve, and EDEM.
Problem Definition
The problem consists of a wheel, that can only rotate around its center.
A number of particles is impinged on the wheel blades, causing it to
rotate. The wheel is modeled in MotionSolve,
while the particles and its interaction with the wheel is modeled in
EDEM. A rigid Wheel to particle
interaction is set up first. The wheel is later replaced with a flexible
body to show flexible body to particle interaction.
Both the wheel and the particle data are given in the table below:
Property
Units
Values
Particles
(Bulk material)
Radius
[m]
0.10
Poisson's ratio
[-]
0.25
Density
[kg/m3]
2500
Shear Modulus
[Pa]
108
Wheel
(Equipment material)
Poisson's ratio
[-]
0.30
Density
[kg/m3]
7860
Shear Modulus
[Pa]
80.77.109
Set Up the Motion Model
Copy the wheel.step file, located in the
mv_hv_hg\mbd_modeling\motionsolve\cosimulation\edem
folder, into your working directory.
Open a new session of MotionView.
Click on Import Geometry, , from the Standard
toolbar.
Locate and select the wheel.step file from your
<working directory> and click
Open.
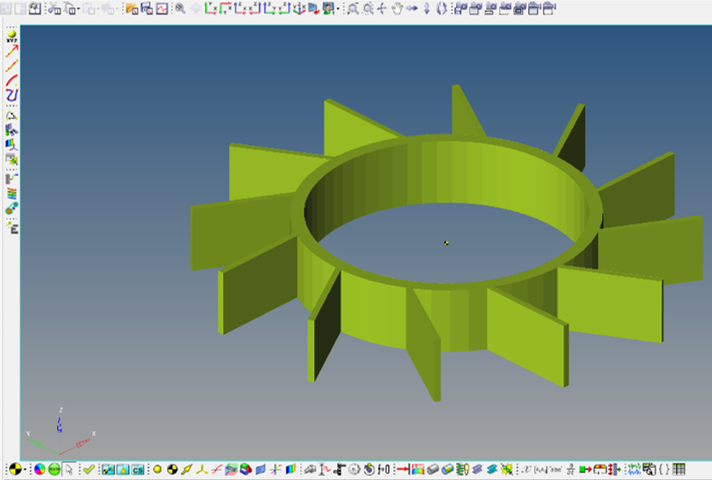
The wheel geometry is imported into MotionView. Figure 1. Model in MotionView after wheel geometry
import
Right-click on the Joint icon from the Constraint
toolbar.
The Add Joint or JointPair dialog is displayed.
Select Revolute Joint from the drop-down list.
Click OK.
In the Joint panel that appears, select the wheel and
Ground Body as Body 1 and
Body 2 collectors respectively.
Double click on the Point collector of Origin, navigate
to the Bodies > Wheel > Inertia Props and select wheel-Inertia Props-cg.
Figure 2. Select a Point dialog to select the CG of the wheel body
Click OK.
Change the Alignment Axis type to Vector and select
Global Z.
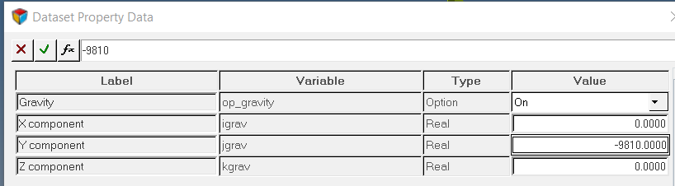
From the Project Browser, select the Solver Gravity
dataset and set Y component to -9810. Set Z component to
0.0.
Figure 3. Dataset - Solver Gravity
Save, , the model as wheel.mdl.
Set Up the EDEM Model
Next, we will set up the EDEM model. EDEM modeling for
this example broadly assumes the following steps that are detailed out further below:
Define a bulk material
Define a particle shape
Define an equipment material
Define the equipment geometry
Define a virtual geometry/particle factory
Define environment parameters
Define the simulation options
Open EDEM.
In the Creator Tree, right click on Bulk Material and
select Add Bulk Material.
A new material named 'BulkMaterial 1' is created. Leave the material
properties unchanged.
Click on + under Interaction.
Select BulkMaterial 1 in the pop-up window.
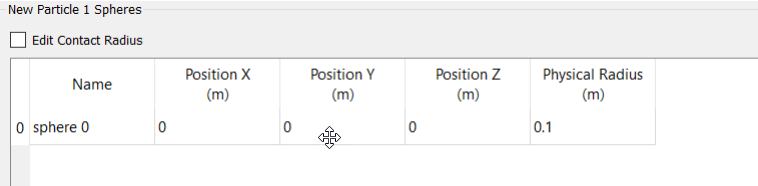
In the Creator Tree, right-click on BulkMaterial 1
(which was just added) and select Add Shape from Library > Single
Sphere.
Set the Physical Radius (m) to 0.1.
Figure 4. Particle Sphere Library
Optional: Due to the change in particle size, you can reset the view of the
particle by selecting on the View panel.
Go to Properties under the New Particle
1 in the Creator Tree and select Auto
Calculation.
The particle geometry is defined now. Next, we will define the equipment
material which represents the material properties for the wheel in EDEM.
In the Creator Tree, right-click on Equipment Material
and select Add Equipment Material.
A new material named 'EquipmentMaterial 1' is created.
Change the Solids density() to 7860 and
Shear Modulus(G) to
80.77e9.
Click on + under Interaction.
In the pop-up window, click OK for
BulkMaterial 1.
From the toolbar on the top, click on the Start Coupling
Server icon to turn on the coupling server.
Figure 5. Turning on the coupling server
This setting allows coupling with MotionView
and MotionSolve.
Return to MotionView and click on the
EDEM Subsystem icon from the Bulk Material Interface toolbar.
Figure 6. EDEM Subsystem Toolbar
In the panel that appears, define the EDEM server on the right side of the
panel.
For EDEM server, choose between Local or
Remote. Select Local
if EDEM and MotionView/MotionSolve are on the same machine. Select
Remote if EDEM resides on a different
machine.
If Remote has been selected, you will have to
define the settings for the remote co-simulation, which are defined in
the Bulk Material Interaction
topic.
Click on the Graphics collector and select the
wheel graphics.
Click on Transfer and Create System. If the transfer is
successful, a confirmation message is displayed in the message log. Close the
message log.
A system called 'DEM 0' is added to the MotionView
model. This system contains all the necessary entities for MotionSolve to simulate with EDEM.
Save, , the model.
Switch to the EDEM graphical user interface.
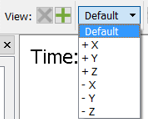
Once the import process is complete, click on the drop-down menu within the
View section on the toolbar and select the
-Z view and zoom in.
Figure 7. View Section
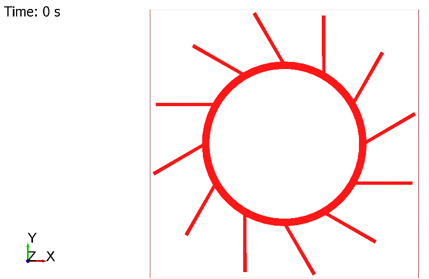
The graphic screen should appear as shown below: Figure 8. Wheel geometry in EDEM
Observe the component under Geometries in the Creator tree. The wheel
has the name ‘wheel’, like the body name in MotionView.
Next, set up the geometry for the particle factory.
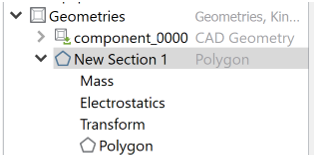
In the Creator Tree, right-click on Geometries and
select Add Geometry and then
Polygon.
A geometry with the name 'New Section 1' is added.
Change the Type from Physical to
Virtual.
Figure 9. Polygon geometry for the particle factory
Select Transform under 'New Section 1' and set the
following properties:
Position
Rotation
X
1.6
1.5708
Y
1.7
0
Z
0
0
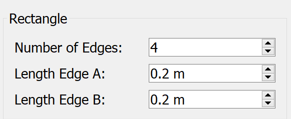
Select Polygon under 'New Section 1' and set the
following properties.
Length
Edge A
0.2
Edge B
0.2
Figure 10. Polygon properties
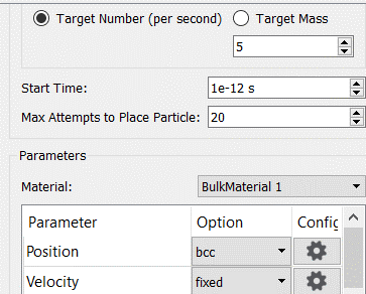
Right-click on New Section 1 and select Add
Factory.
Set the Target number (per second) equal to
5.
Set bcc in Position.
Figure 11. Adding Factory
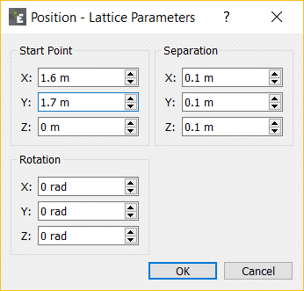
Click on the gear icon to display the Position - Lattice Parameters
dialog.
Under Start Point, set X and
Y to 1.6 and
1.7 respectively.
Leave the remaining fields set to the default values.
Figure 12. Position - Lattice Parameters
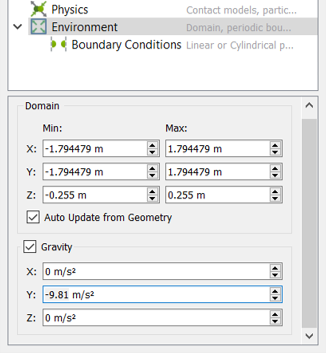
In the Creator Tree, select Environment and set the
Gravity – Y to -9.81.
Figure 13. Setting gravity
Save the model as wheel.dem using the File menu or Save
icon on the top toolbar.
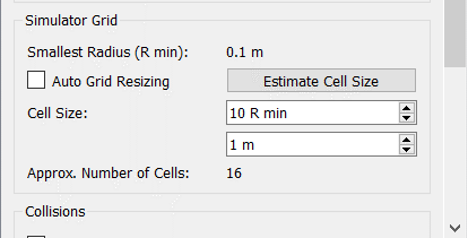
Simulation Set Up in EDEM
Switch to the Simulator.
Figure 14. Simulator icon on the toolbar
Click on Estimate Cell Size and accept the derived cell
size.
Figure 15. Estimating cell size
Confirm that the Coupling Server is on.
Tip: Hovering over the icon should show a tool tip text similar to
“Listening on port 32969”.
The EDEM model is now ready to simulate with MotionSolve.
Run the Simulation
Go to the Run panel .
Click on Simulation Settings and go to the
Transient tab.
Set Maximum step size to
0.001.
Close the dialog.
Change the End time to 10.
Click on the Run button to start the simulation.
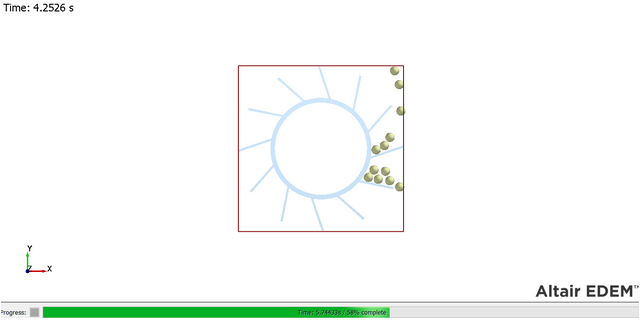
MotionSolve is invoked and the simulation should
also begin on EDEM side. The simulation process should also be visible in
EDEM. Figure 16. EDEM graphic screen during simulation
In EDEM, click on Auto update on the top toolbar to
update the graphic visualization as the simulation progresses.
Figure 17. Auto update
Once the simulation is complete, close the Message Log in MotionView and the MotionSolve solver window.
Post-processing
For components that are interacting in EDEM, the animation can be visualized in EDEM
through the Analyst page.
Click on the Analyst icon in the toolbar.
Figure 18. Analyst icon on the toolbar
Reset the animation with the toolbar at the bottom.
Figure 19. Animation bar in EDEM
Click the Animate Forwards icon .
Translate EDEM particle results to HyperView
H3D.
In MotionView, from the EDEM menu, select
Generate H3D from EDEM results.
Provide the wheel.dem file that was saved in EDEM
as input.
Click OK.
On Windows, a command window is displayed, showing the progress
of converting particle information into H3D. The file
wheel_edem.h3d is generated.
Visualize the animation in HyperView.
From the MotionView Run panel, click
Animate to load the MotionSolve H3D result in a HyperView window.
In HyperView, activate the
Overlay check box in the Load Model
panel.
Use the Open Model file browser to locate and select the
wheel_edem.h3d file from the working
directory.
Click Apply (answer Yes
to the pop-up warning message).
Animate using the Start/Pause Animation button
.
Flexible Body Coupling
Setting up and running a co-simulation with a flexible body follows the same steps as
those performed with a rigid body in the previous step.
Note: A flexible body
interaction can be set up directly. It's not necessary to perform its rigid body
interaction first.
An equivalent flexible body H3D file of the wheel is available.
Copy the file flex_wheel_flex_blades.h3d, located in the
mv_hv_hg\mbd_modeling\motionsolve\cosimulation\edem
folder to your working directory
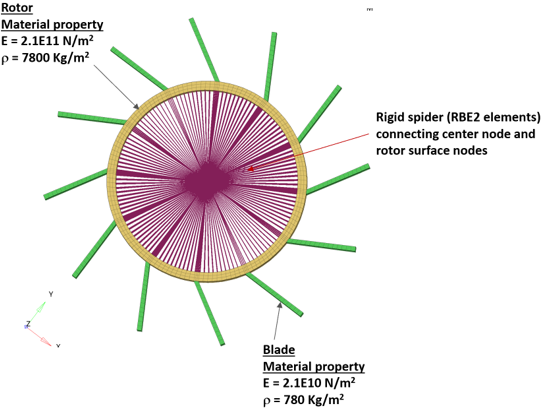
The flexible body is created with the following features:
The rotor elements are assigned the material property steel.
The blade element material has a material with 10% of Modulus of
elasticity and density as steel.
The center node is connected to the nodes on the inner surface of the
rotor using rigid (RBE2 elements).
The center node and a node on each blade (arbitrary) has been selected
as interface nodes for an adequate modal representation.
Figure 20.
Return to the MotionView window.
Select the DEM system (DEM_0), deactivate it through the right-click context
menu Deactivate > Selected only.
Select the body (wheel) from the Model browser or
through the graphics area.
From the Body panel, active Flex Body (CMS).
Select the flexible body H3D file
flex_wheel_flex_blades.h3d as the Graphical
source.
If a confirmation dialog prompts you to confirm the use of the same file as the
Functional source, click Yes.
Click Nodes….
Find a node in the flexible body corresponding to the center joint location by
clicking either Find All or Find
on the row entry for the Joint Marker.
Close the dialog.
In the EDEM GUI, click Creator to return to the creator
context.
Reset the time to 0 s.
Under Geometries, select the wheel geometry and delete
it.
Save the EDEM file as wheel_flex.dem.
In MotionView, load the EDEM System panel.
Change the collector to the Body collector. Pick the
wheel [Flex body].
Click Transfer and Create System.
The flex body should be transferred to EDEM. A new DEM system is also
created in MotionView
Go to the Run panel. Change the XML filename to
wheel_flex.xml.
Click Run.
Once the run is complete, follow the procedures mentioned in Post-processing, steps 4 and 5, to visualize the
results
 , from the Standard
toolbar.
, from the Standard
toolbar.

 , the model as wheel.mdl.
, the model as wheel.mdl.
 on the View panel.
on the View panel.
 ) to 7860 and
Shear Modulus(G) to
80.77e9.
) to 7860 and
Shear Modulus(G) to
80.77e9.

 from the Bulk Material Interface toolbar.
from the Bulk Material Interface toolbar.
 to display the Position - Lattice Parameters
dialog.
to display the Position - Lattice Parameters
dialog.

 .
.



 .
.
 HyperView.
HyperView.
 .
.