Adaptive Response Surface Method (ARSM)
Internally builds response surfaces and adaptively updates them as new evaluations are available.
The first response surface the Adaptive Response Surface Method builds is a linear regression polynomial, then it finds the optimum on this surface and validates it with the exact simulation. If the output response values from the response surface and the exact simulation are not close; the Adaptive Response Surface Method updates the surface with the new evaluation and finds the optimum in this updated surface. This loops is repeated until one of the convergence criteria is met.
Usability Characteristics
- Adaptive Response Surface Method is the default method. However, if the number of input variables is large, or if a global optima is required, then it is suggested that you use Global Response Search Method instead.
- For Revisions A-multi and B-multi, Adaptive Response Surface Method can take advantage of parallel execution. The number of runs in the iterative stages after N+1 evaluations (N is the number of variables) can be controlled by the setting parameter Points per iteration.
- It is an efficient optimization method because it utilizes response surfaces. It is recommend to use Adaptive Response Surface Method directly on a solver and not on a Fit.
- In the case of a failed run, it is possible to ignore a failed analysis or terminate an optimization. When omitting failed runs, the optimizer will back up half of a step between the failed run and the previous design.
- Adaptive Response Surface Method terminates when one of the following
conditions are met:
- One of the convergence criteria is satisfied.
- The maximum number of allowable analysis (Maximum Iterations) is reached.
- An analysis fails and the Terminate optimization option is the default (On Failed Evaluation).
- Supports input variable constraints.
- The algorithm begins with N+1 evaluations, where N is the number of design variables. When SRSM is set to Response Surface, control the number of initial evaluations using the Sample Points parameter. The number of evaluations in subsequent iterations is controlled by the Points per Iteration setting. Evaluations are created sequentially by default. Adjust the Revision setting to use muli variants to execute evaluations in parallel.
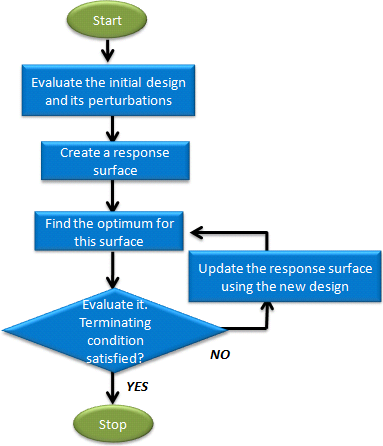
Figure 1. Adaptive Response Surface Method Process Phases
Settings
| Parameter | Default | Range | Description |
|---|---|---|---|
| Number of Evaluations | 25 | >0 | Maximum number of analyses (only for Adaptive Response Surface Method number of analysis is equal to number of iterations) allowed. |
| Absolute Convergence | 0.001 | >0.0 | Determines an absolute
convergence tolerance, which is constant and equal to Absolute
Convergence, times the initial objective function
value. The design has converged when there are two consecutive
designs for which the absolute change in the objective function
is less than this tolerance. There also must not be any
constraint whose allowable violation is exceeded in the last
design. Note: A
larger value allows for faster convergence, but worse results could be
achieved.
Where is the objective value; is the objective value of the initial design; is the current iteration number; is the absolute convergence parameter; is the maximum constraint violation; is the allowable constraint violation. |
| Relative Convergence (%) | 1.0 | >0.0 | The design has converged if the relative (percent) change in
the objective function is less than this value for two
consecutive designs. There also must not be any constraint whose
allowable violation is exceeded in the last design. Note: A
larger value allows for faster convergence, but worse results could be
achieved.
|
| Design Variable Convergence | 0.001 | >0.0 |
Input variable convergence parameter. Design has converged when
there are two consecutive designs for which the change in each input
variable is less than both (1) Design Variable
Convergence times the difference between its bounds, and (2)
Design Variable
Convergence times the absolute value of its initial value
(simply Design
Variable Convergence if its initial value is zero). There also
must not be any constraint whose allowable violation is exceeded in the
last design.
Note: A larger value allows for faster convergence, but
worse results could be achieved.
|
| On Failed Evaluation | Terminate optimization |
|
|
| Parameter | Default | Range | Description |
|---|---|---|---|
| Initial Linear Move | By DV Initial |
|
LB, UB Lower and upper bounds on input variable |
| Move Limit Fraction | 0.15 | 0.0 < Move Limit Fraction < 1.0 | Move limit fraction. Note: Smaller values allow for a more
steady convergence (smaller fluctuation of the output
response values), but more computational effort could be
consumed.
The value will be adaptively updated during
optimization process. |
| Initial Input Perturbation | 1.1 | ≠0.0 | Initial input variable perturbation value. Larger value result in wider spread of the initial N designs ( is the number of input variables; the designs together with the start design can determine a linear response surface). Adaptive Response Surface Method will search the design space more widely. |
| Constraint Screening (%) | 50.0 | real value | Constraint screening.
|
| Max Failed Evaluations | 20,000 | >=0 | When On Failed Evaluations is set to Ignore failed evaluations (1), the optimizer will tolerate failures until this threshold for Max Failed Evaluations. This option is intended to allow the optimizer to stop after an excessive amount of failures. |
| Minimal Move Factor | 0.1 | 0.0 < Minimal Move Factor < Move Limit Fraction | Minimal move factor. It is to avoid too small of the step size. It is used in the initial sampling step (See Minimal Move Factor in Initial Linear Move) and also in the preceding move limit strategy. |
| Response Surface | SORS |
|
When there are a lot of input variables and the computational effort is limited, SRSM is a good choice. |
| Solver | SQP |
|
The method Adaptive Response Surface Method uses to solve the
response surface based optimization problem. Tip: It
is recommended to use 2 when there are a lot of discrete
variables.
|
| Points per Iteration | 1 | >0 | Controls the number of points used in an iteration after the first iteration. The number of points used per iteration can result in different iteration histories. |
| Sample Points | 0 | >=0 |
|
| Use SVD | No | No or Yes | Useful in case of soft convergence In case of soft
convergence:
|
| Revision | A-multi |
|
Assists when there is a convergence difficulty. The B
revision is less likely to become stuck if iterations do not
exhibit successive improvement. By default, "A" is selected
meaning the legacy algorithm. Note: A-multi and B-multi are new
versions of A and B that support multi-execution. The
classification of iteration points is different between A
and A-multi (and B and B-multi).
|
| Use Inclusion Matrix | With Initial |
|
|