Rigid Link (/RLINK)
The rigid link option imposes the same velocity on all secondary nodes for one or more directions. Directions are defined to a skew or a global frame, velocity is computed with momentum conservation.
No global moment equilibrium is respected. A rigid link is equivalent to an infinite stiff spring
TYPE8.
Note: A rigid link is a Radioss Engine
input. A rigid link is alive only during the current restart run. For permanent
rigid bodies, the input has to be repeated in each Engine input deck.
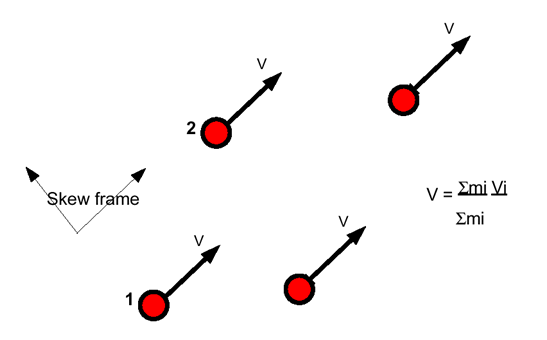
Figure 1. Rigid Link Model