形状最適化
構造の外側の境界を変更して、最適化問題を解く最適化手法。
有限要素モデルを使用し、形状は節点位置により定義され、形状最適化はそれらの位置を修正して形状を更新します。
形状最適化をインプリメントするには、形状変数が必要です。DESVARバルクデータエントリを使用して、各形状変数を定義します。離散設計変数が必要な場合は、設計変数の値として、DDVALバルクデータエントリを参照する必要があります。DVGRIDバルクデータエントリでは、特定の節点位置を設計変数でどの程度変更するかを定義します。モデルには、任意の数のDVGRIDバルクデータエントリを追加できます。既存のDESVARバルクデータエントリで最適化を構成する場合、各DVGRIDバルクデータエントリはこれを参照する必要があります。OptiStructのDVGRIDデータには、基本的な形状ではなく、節点位置の摂動が収められています。
OUTPUT, DVGRIDオプションを指定すると、変位に関する形状変数定義、あるいは線形静解析、ノーマルモード解析、または線形座屈解析の固有ベクトルの結果が作成されます。作成された形状変数定義は以降の最適化で再利用できます。このようなプロセスになっているため、“自然な”形状関数を容易に使用できます。
設計変数およびDVGRIDバルクデータエントリは、HyperMeshソフトウェアの1つであるHyperMorphユーティリティで容易に生成できます。
形状最適化は、小さい形状変化と大きい形状変化の両方に適用できます。小さい形状変化とは、設計空間内のパート間の結合性が反復的に更新されないことを意味します。
大きな形状変化の最適化
形状最適化では、接触インターフェースまたはコネクター要素インターフェースの大きな形状変化がサポートされます。
大きな形状変化最適化は、最適化プロセスの各反復において、モデル内のコネクター要素または接触の位置の更新を必要とする、形状最適化の一種です。接触の場合、セカンダリ(旧称“スレーブ”)およびメイン(旧称“マスター”)サーフェスの形状変化が反復ごとに更新されます。
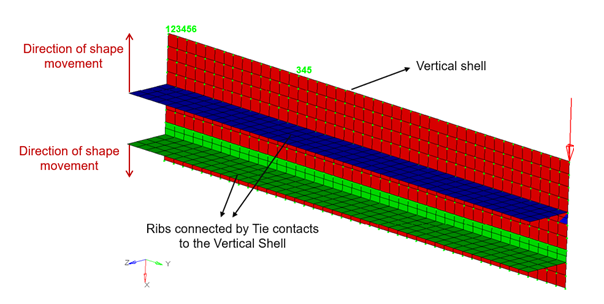
図 1. 大きな形状変化の最適化例
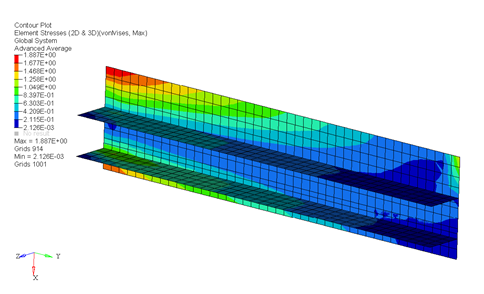
図 2. 初期設計

図 3. 最終設計
現在、接触を伴う大きな形状変化は、節点-サーフェスタイプの接触と、CGAP、CGAPG、CWELD、CFASTなどのコネクター要素でのみサポートされています。
大きな形状変化は、サーフェス-サーフェスタイプの接触が入力ファイルに存在する場合は、そのような接触が設計領域上にあるかないかにかかわらず、オンにはなりません。この場合、通常の形状最適化が使用され、そのプロセス中に結合の更新は行われません。
大きな形状変化の最適化は、線形静解析、ノーマルモード解析、座屈解析、応答スペクトル解析、周波数応答解析、および純定常熱解析(CGAPG要素とN2S接触のみ)でサポートされています。
CWELD、CFASTまたはCSEAM要素について大きな形状変化が予想される場合、サイドAとBのシェルプロパティIDを用いてサーフェスパッチ間の結合を定義することが推奨されます。
| 質量 | 体積 | 重心位置 |
| 慣性モーメント | 静的コンプライアンス | 静的変位 |
| 周波数 | 座屈係数 | 静的応力、ひずみ、要素力 |
| 複合材の静的応力、ひずみ、破壊指数 | 周波数応答変位、速度、加速度 | 周波数応答応力、ひずみ、要素力 |
| 重み付きコンプライアンス | 重み付き周波数 | コンプライアンスの重ね合わせによる指標 |
| 関数 | 温度 |