乗用車とトラック
Altair Driverはシンプルなドライバーモデルです。このモデルは、MotionViewおよびMotionSolveによるすべての車両イベントで使用します。コントローラーは、現在の車両の状態に基づいて今後の走行経路を予測し、車両動解析の情報を持っていて、ユーザー定義のドライバーパラメータにアクセスします。
入力されたドライバーパラメータはドライバーの制御の優先順位を決定します。車両パラメータは、シンプルな線形二輪モデルに基づいて車両の未来の状態を推測するために使用されます。以下では、車両とドライバーのパラメータとそれらが経路プランにもたらす影響について説明します。
- 使用方法
-
Altair Driverは、Control State Equation(CSE)として実装されます。CSEからの出力(スロットル、ブレーキ、ステア、ギア、およびクラッチ)は、パワートレイン、ブレーキ、およびステアリングシステムで使用します。MotionViewのAnalysis Wizardで車両イベントを選択すると、必要なエンティティ(配列、ソルバー変数など)と共に、このドライバーがマルチボディモデルに自動的に追加されます。
- 理論
-
多輪の車両を表すために、既知の二輪モデルが最初の近似として使用されます。
ステアリング制御では、次の2つの制御モデルがあります:- 運動学二輪モデル
- 動力学二輪モデル
- 運動学二輪モデル
-
運動学二輪モデルでは、システムを制御する幾何学的関係にのみ基づいて運動方程式が決まります。運動学モデルの開発で使用する重要な前提は、ポイントAとポイントBにおける速度ベクトルがそれぞれフロントホイールとリアホイールの方向を向いていることです。これは、両方のホイールにおける“スリップ角”が0であるという前提と同じです。この前提は、低速(速度が5 m/s未満)で運動する車両で妥当です。このモデルでは、滑りや横滑りなどの車両の動力学は考慮されません。
二輪モデルの運動方程式は、自由度が3の非線形モデル
 を提供する、車両の座標系で作成します。
を提供する、車両の座標系で作成します。次の図のような状態ベクトルの下で、3つの微分方程式の組み合わせとして運動方程式を記述します。

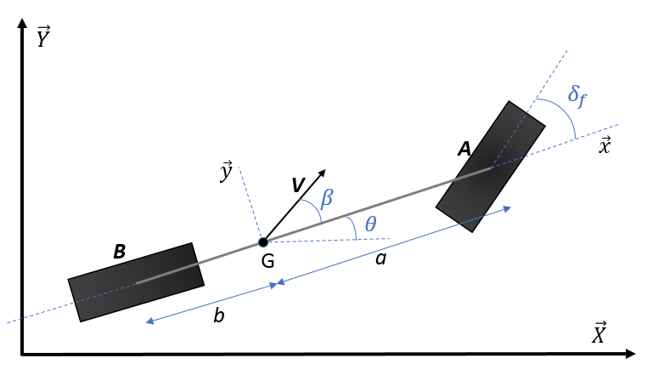
図 1.それぞれの変数は次のとおりです:
- 車両のヨー角

- 車両の横方向変位

- 車両の縦方向変位
運動方程式は次のように記述できます。
ここで、
 - 車両の速度
- 車両の速度 - 後車軸から重心までの距離
- 後車軸から重心までの距離 - 重心におけるスリップ角
- 重心におけるスリップ角 - 動力学二輪モデル
-
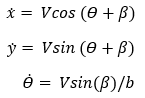
より速い車両速度の下では、それぞれのホイールにおける速度がホイールの方向を向いているという前提が成り立たなくなります。この場合は、運動学モデルの代わりに、横方向の車両運動を扱う動力学モデルが必要です。
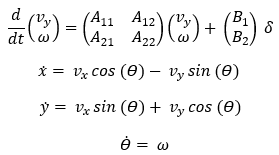
二輪モデルの力方程式は、自由度が5の非線形モデル
を提供する、車両の座標系で作成します。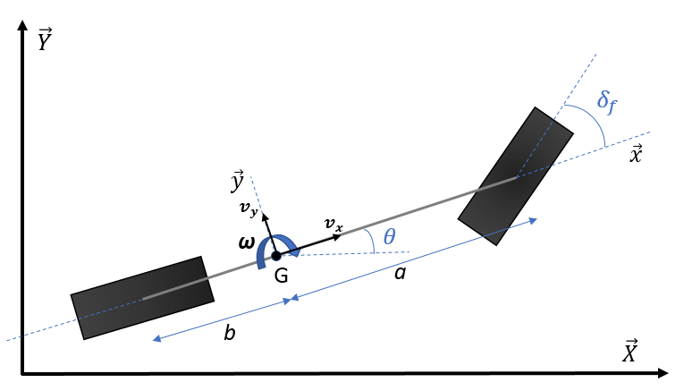
図 2.次の図のような状態ベクトルの下で、5つの微分方程式の組み合わせとして運動方程式を記述します。
 それぞれの変数は次のとおりです:
それぞれの変数は次のとおりです:
- 車両の横方向速度

- 車両のヨーレート
- 車両のヨー角
- 車両の横方向変位
- 車両の縦方向変位

- ホイールのステアリング角(ラック / ピニオン減速比によりステアリングホイール角に正比例)。
ニュートンの運動の第2法則を使用して、次のように方程式を記述できます。
ここで、
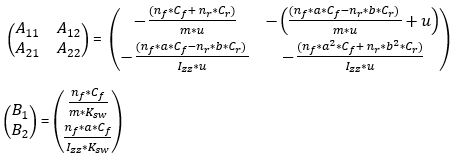 ここで、
ここで、
- 車両の速度

- (1つの)フロントタイヤのコーナリング剛性

- (1つの)リアタイヤのコーナリング剛性

- 車両の質量

- 車両のヨー慣性

- 車両のステアリング比

- フロントタイヤの数

- リアタイヤの数

- Front axle to CG distance
- Rear axle to CG distance
3軸以上の多軸車両の場合は、
 と
と が車両のアクスル構成に従って計算され、上記の式でaとbとして使用されます。
が車両のアクスル構成に従って計算され、上記の式でaとbとして使用されます。一旦運動方程式が記述されると、問題は古典的な制御理論の問題となります。目的は、車両が所定の経路にできるかぎり近い経路に従うようなステアリングホイール角を計算することです。
これは、さまざまな方法で実現できます。戦略の1つは、最適制御理論を使用し、異なる時刻で評価される一連の重み係数(横方向位置誤差、ステアリングホイール角、進行方向誤差など)を表現する費用関数を最小化することです。
Altair Driverでは、将来のある時点における予測経路と目的経路の誤差をMotionSolveで計算します。前述のとおり、コントローラーは車両動解析の方程式を完全に理解しており、それらの方程式に基づいて、将来のある時点での予測位置を計算できます。
予測経路を計算するには、ルンゲ・クッタ積分法を使用して、目的とする時間で運動方程式を積分します。MotionSolveのスプラインユーティリティを使用したスプライン補間によって経路を取得します。
予測される経路と望ましい経路の先の時点での違いが誤差となります。
次のようになります:

アルゴリズムは、ステアリングホイール角に対するこの誤差の感度を評価することで誤差を推測しようとします。誤差がある許容値未満になると収束が達成されます。
最終的なステアリングホイール角は、以下で説明する反復法で計算されます。- 2つの適切なステアリングホイール角の値が選択されます(
 および
および )。
)。 - は現在のステアリング角として選択され、は現在のステアリング角に1度を加算した値です。
 関する誤差と
関する誤差と が計算され、ステアリングホイール角
が計算され、ステアリングホイール角 は次の数式を使用した線形補間によって選択されます。
は次の数式を使用した線形補間によって選択されます。
- ステアリングホイール角に関する誤差が特定の許容値未満の場合は、それが次のタイムステップでのステアリングホイール角として使用されます。
- ステアリングホイール角に関する誤差が許容値より大きい場合は、との中でより大きな誤差を生じさせるほうがで置き換えられ、手順2が再度実行されます。
- 最後に、ステアリングホイール角が20回の反復後にも収束しない場合は、誤差は無視されシミュレーションは停止し、車両が経路を追跡できないことを通知します。
最終的なステアリングホイール角は、基本的には、以下に示すように現在のステアリングホイール角の増分として使用されます。新しいステアリングホイール角の値を計算するとき(t+1の時)、以前のステアリングホイール角の値(tの時)は、次式のように更新されます:
 ここで、
ここで、
- ステップサイズ(最後に成功した積分の時刻と現在時刻の差)。

- ドライバーの反応時間を収集するフィードバックの頻度(ステップ頻度未満の値になります)。
- 制限事項
-
運動学モデルは、車両の低速運動でのみ有効です。より速い速度では、このモデルで考慮されないホイールで顕著なスリップ角が生成されます。
動力学二輪モデルでは、横方向タイヤ力がスリップ角に比例することを前提としました。この関係は、スリップ角が小さいほど有効です。コントローラーでは車両のこの簡素化した線形表現が使用されるので、この関係を適用できる範囲は線形範囲に限定されます。
- ユーザー入力
-
Altair Driverパネルでは、車両パラメータとドライバーパラメータを入力できます。車両パラメータ配列には、二輪モデルの定義で使用される値が含まれます。
それらは:- リアWCとCG間の距離()
- フロントWCとCG間の距離()
- 車両質量()
- 車両ヨー慣性()
- フロントタイヤのコーナリング時の剛性()
- リアタイヤのコーナリング剛性()
Altair DriverパネルでCalculateボタンをクリックして、これら(
とを除く)と、車両のブレーキパラメータと駆動系パラメータを更新することもできます。これらのほか、数学モデルでは、過渡的操縦操作を実行する前にドライバーで計算されるステアリング比(入力であるステアリングホイール角とホイールのステア角との比率)も使用されます。
ドライバーの動作に影響する他のドライバーパラメータとして、以下のパラメータがあります。- 先読み値(秒)
- フィード頻度の値()(-)
- 最大ステアリングホイール角(度)
- 最小ステアリングホイール角(度)
- 経路参照マーカー(通常は、タイヤシステムに設定した路面参照マーカー)
最大ステアリングホイール角は、最終的に計算されたステアリングホイール角のカットオフ値として使用されます。
- リアWCとCG間の距離(