Advanced Settingsダイアログ
Advanced Settingsダイアログから、解析および出力オプションにアクセスできます。
Run SettingsダイアログででAdvanced Settingsをクリックして、以下のダイアログを表示します:
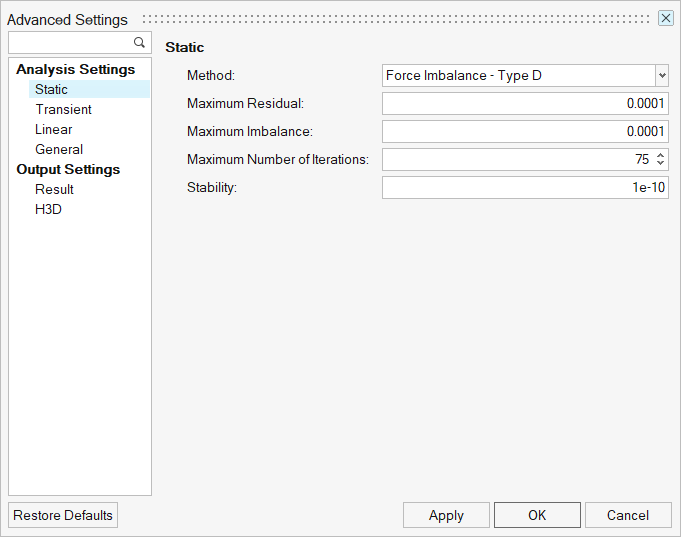 図 1. Advanced Settingsダイアログ
図 1. Advanced Settingsダイアログ
図 1. Advanced SettingsダイアログAnalysis Settings
Analysis Settingsを使用してソルバーパラメータを編集します。
Static
静的ソルバー法のオプションを設定します。
| オプション | 詳細 | |
|---|---|---|
| Method | ドロップダウンから静的ソルバーのタイプを選択します。 | |
| Force Imbalance - Type S | Force Imbalance Method法を用いて、静的平衡を計算します。 | |
| Force Imbalance - Type D | 疑似静的シミュレーションに時間積分アプローチを用いたForce Imbalance Method。静的シミュレーションには適用されません(MotionSolveのデフォルトはForce Imbalance - Type S)。この方法を使用している間、ソルバーは過渡解析シミュレーションの設定も使用します。 | |
| Max Kinetic Energy Attrition | エネルギー保存則に基づくMaximum Kinetic Energy Attrition Methodを使用します。この方法は、接触があるモデルに適しています。この方法は、準静的シミュレーションには使えません。 | |
| 以下のオプションは、Force Imbalance - Type D/Type Sを選択した場合に使用できます。 | ||
| Maximum Residual | 静的平衡点におけるシステム方程式の残差の変化に対する上限を指定します。 | |
| Maximum Imbalance | 解析点で運動方程式に許容する最大力不均衡を指定します。 | |
| Maximum Number of Iterations | 反復の最大許容回数。反復回数がこの値を超えるとシミュレーションが停止します。 | |
| Stability | ヤコビアン行列が特異マトリクスにならないように加算する、質量行列の比率を指定します。 | |
| 以下のオプションは、MKEAMを選択した場合に使用できます。 | ||
| Maximum number of iterations | 反復の最大許容回数。反復回数がこの値を超えるとシミュレーションが停止します。 | |
| Maximum residual kinetic energy tolerance | 静的平衡点におけるシステムの最大許容残留運動エネルギーを指定します。 | |
| Maximum coordinate difference tolerance | 静的平衡点におけるシステム状態の変化に対する上限を指定します。 | |
Transient
積分器のオプションを設定します。
| オプション | 詳細 | |
|---|---|---|
| Integrator Type | ドロップダウンから積分器のタイプを選択します。
|
|
| すべての積分器に対して以下の共通オプションが使用可能です: | ||
| Maximum Step Size | 積分器に許容する最大ステップサイズを定義します。 | |
| Integrator Tolerance | 変位、速度、および微分方程式の状態を計算するときに積分器に許容する1ステップあたりの最大絶対誤差を表します。 | |
| Constraint Tolerance | 各ステップにおいてシステム構成およびモーション拘束で満たされるべき精度を定義します。 | |
| Maximum Order | 積分器で取る最大次数を指定します。 | |
| Maximum Initial Step Size | 最大初期ステップサイズです。 | |
| Minimum Step Size | 積分器で許容する最小ステップサイズを定義します。 | |
| Velocity Tolerance Fact | 速度状態量の誤差許容値を返すため、integr_tolに乗じる係数です。DSTIFF積分器の場合、このオプションは、 DAE Indexが1に設定され、Velocity Controlオプションが選択されている場合にのみ適用されます。 | |
| 以下のオプションはDSTIFFに特有です。 | ||
| DAE Constraint Tolerance | 修正子が収束時に満たす必要のあるすべての代数拘束方程式の許容値です。 | |
| DAE Index | DAE定式化のインデックス。指定できるオプションは3または1です。 | |
| DAE Corrector Maximum Iteration | 収束を達成するために修正子で実行を許可される反復の最大回数です。 | |
| Initial Number of Jacobian Matrix Evaluation | この属性は修正子の反復時のJacobian matrix evaluationを制御します。指定できるオプションは Auto|1|2|3.
|
|
| Velocity Control | 各ステップにおける局所的な積分誤差がないかを、速度の状態量でもチェックするかを制御する論理フラグです。このオプションは、DAE index = 1である場合にのみ使用可能です。 | |
| DAE Interpolation | 積分器が出力ステップで結果を補間するかどうかを指定します。オンにすると、MotionSolveで開始時刻から終了時刻までのシミュレーション中に、出力ステップで結果を補間するように強制されます。 | |
Linear
線形オプションを設定します。
| オプション | 詳細 |
|---|---|
| Eigen Values And Vectors | 固有値および固有ベクトルデータを.eigファイルに書き込むかどうかを指定します。 |
| Disable Damping | 線形ソルバーで固有値解析におけるすべてのフォース要素から減衰を無効にするかどうかを指定します。 |
| Kinetic Energy Distribution | モーダル運動エネルギー分布をソルバーログファイルおよび*_linz.mrf出力ファイルに書き出すかどうかを指定します。 |
| Generate State Space Matrix |
|
| Animation Scale | アニメーションのスケール。線形解析に使用し、モーダルアニメーションのスケールファクターを設定します。デフォルト = 1。 |
General
一般オプションを設定します。
| オプション | 詳細 |
|---|---|
| Number of CPU cores in SMP run | 複数のCPUコアが使用可能な場合に使用するコアの数を指定します。接触シミュレーションで計算を並列化する際に特に効果的です。 |
| Mesh coarseness for contacts | 接触におけるCADGraphicsメッシュの粗さのデフォルト設定。MotionView は、メッシュの粗さが個別に設定されていないCADGraphicsのソルバーへのエクスポート時に、この設定を使用してメッシュを生成します。 |
| Default location for solver run files | 解析に使用するデフォルトの場所です。指定しない場合、ソルバーデックはモデルの位置に書き込まれます。 |
| Write Msolve Python file | ライブ実行用にMotionSolve Python ファイルを書き込みます。このPythonファイルはデバッグに使用できます。 |
| Export MDL animation file | HyperViewでモデルとして読み込むことができる.mafファイルを書き込み、.mrfとして結果を表示できるようにします。 |
Output Settings
Output Settingsを使用して、出力オプションに関するユーザープリファレンスを設定します。
結果
出力ファイルタイプ、ゼロトレランス、およびデバッグオプションを設定します。| オプション | 詳細 | |
|---|---|---|
| Plot file options | ||
| Multibody Result File (MRF) | .mrfフォーマットに結果ファイルを書き込みます。 | |
| ASCII Plot File (PLT) | .pltフォーマットにプロットファイルを書き込みます。 | |
| Altair Binary File (ABF) | .abfフォーマットにプロットファイルを書き込みます。 | |
| Do Not Append REQ/id To Output | 出力の名前に接頭辞が付加されないようにするには、この設定をONにします。接頭辞の名前は、3文字のキーワードと出力IDの組み合わせで、たとえばREQ/70000001となります。 | |
| Capture Max Penetration During Contact | 2つの書き出しタイムステップ間で貫通の深さが両方のタイムステップよりも大きい際に、ソルバーに追加の出力を導入するようフラグを立てます。 | |
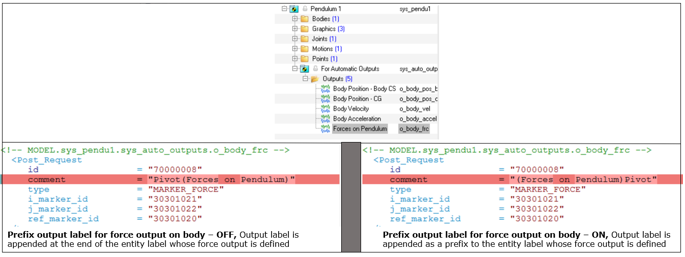
| Prefix Output Label For Force Output On Body | 任意のボディにあるフォースタイプ出力のラベルをソルバーデックにどのように書き込むかを制御します。 | |
|
注: Prefix output label for
force output on bodyオプションをオンにすると、ボディとの接続のラベルに出力ラベルが接頭辞として付加されます。オフにしている場合は、接続のラベルの末尾に出力ラベルが付加されます。
 |
||
| Write Result Data Per Time | 指定の時刻で1件以上の結果が存在する場合に、ABFファイルとPLTファイルに単位時間あたりで出力する結果データを選択します。指定できるオプションはALL、FIRST、またはLASTです。 | |
| Measure Rotation | ドロップダウンメニューから角度結果の形式を選択します。指定できるオプションはYAW_PITCH_ROLLまたはEULER_ANGLESです。 | |
| Zero Tolerance | ||
| Displacement | ここで指定した値より小さい出力変位は0に設定されます。 | |
| Velocity | ここで指定した値より小さい出力速度は0に設定されます。 | |
| Acceleration | ここで指定した値より小さい出力加速度は0に設定されます。 | |
| Force | ここで指定した値より小さい出力フォースは0に設定されます。 | |
| Debug Options | ||
| Write Debug Info | ソルバー解析ステップのデバッグ情報の生成を制御する論理フラグです。 | |
| Generate Animation At Each Iteration (Static Simulation Only) | デバッグ目的で反復ごとにアニメーションフレームの生成を制御する論理フラグです。 | |
H3D
アニメーションファイルの設定を行います。
| オプション | 詳細 |
|---|---|
| Animation File (H3D) | .h3dフォーマットにアニメーションファイルを書き込みます。 |
| Contact Forces | .h3dファイルの接触力のベクトルアニメーション。 |
| Flexible Bodies Velocity and Acceleration | MotionSolve実行時における弾性体の速度と加速度の出力。 |
| Format | ドロップダウンからH3Dファイルフォーマットを選択します。
|
| Stress |
ドロップダウンから、H3Dファイルでの応力のフォーマットを選択します。
|
| Strain |
ドロップダウンから、H3Dファイルでのひずみのフォーマットを選択します。
|
| Write H3D Results for Every Step | .h3dファイルに結果を書き込む頻度を制御します。 |
| Write H3D Results Starting At | .h3dファイルへの結果の書き込みの開始時刻を制御します。 |
| Stop Writing H3D Results At | .h3dファイルへの結果の書き込みの終了時刻を制御します。 |