路面モデリング
軟質土壌の路面は、下の図のように、垂直方向(z軸方向)に変形可能なスプリングの長方形構造のグリッドとして表現されます。このアプローチでは、各スプリングが小さい路面パッチを表現し、必要な情報をそこに保存できます。
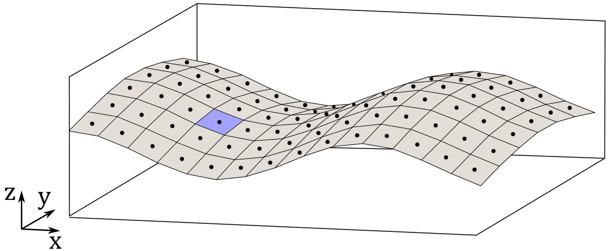
図 1. 変形可能なバネの規則的なグリッドとしてモデル化された路面
土壌ライブラリ
すぐに使用できるさまざまな土壌の路面データファイルを収めた土壌ライブラリは、インストール環境(<Installation>\hwdesktop\hw\mdl\autoentities\properties\Tires\ALTAIR_SOFTSOIL)にあります。
路面データファイル
軟質土壌モデルのすべての必須(およびオプション)パラメータは、路面データ(.rdf)ファイルで提供されます。これはタイヤ、クローラ・履帯、または両方のモデルで使用できます。土壌プロパティは、Common Soil Properties、Tire Soil Properties、Track Soil Properties、Advanced Track Soil Propertiesに構造化できます。
| パラメータ | 説明 |
|---|---|
| PHI | 内部せん断抵抗が示す角度 [単位: 角度] |
| C | 土の見掛け凝集力 [単位: フォース/長さ**2] |
| KC | 圧力と沈下量のパラメータ [単位: フォース/長さ**(n+1)] |
| KPHI | 圧力と沈下量のパラメータ [単位: フォース/長さ**(n+2)] |
| SINKAGE_EXPONENT | 沈下量の指数n [単位: -] |
| SOIL_STIFFNESS | 土の弾性剛性 [単位: フォース/長さ**3] |
| SOIL_DAMPING | 土による減衰 [単位: フォース*時間/長さ] |
| SOIL_DENSITY | 土の密度 [単位: 質量/長さ**3] |
| KX1 | せん断変形係数 [単位: 長さ] |
| KY1 | せん断変形係数 [単位: 長さ] |
| パラメータ | 説明 |
|---|---|
| KX0 | せん断変形係数 [単位: 長さ] |
| KY0 | せん断変形係数 [単位: 長さ] |
| C1 | 最大法線方向応力のホイール角のパラメータ [-] |
| C2 | 最大法線方向応力のホイール角のパラメータ [-] |
| パラメータ | 説明 |
|---|---|
| R_CASE | 軟質土壌モデルの入力レポート(0≤R_CASE≤2)
|
| WID_OR_MIN | Bekkerパラメータbの定義(1≤WID_OR_MIN≤2)
|
| パラメータ | 説明 |
|---|---|
| DELTA | 土-グローサーの内部摩擦角。 DELTA<0の場合、DELTA=PHI*|DELTA| |
| CA | 土とグローサーの凝集力。 CA<0の場合、CA=C*|CA| |
| R_JAN | 改良型Janosiのr |
| JMAX | 改良型Janosiのjmax JMAX<0の場合、JMAX=|JMAX|*(リンク長さ) |
| JULT | 改良型Janosiのju JULT<0の場合、JULT=|JULT|*(リンク長さ) |
| AS | せん断塑性係数(0≤AS≤1) |
| AM | グローサー力塑性係数(0≤AM≤1) |
| PHI_LONG | 土の内部摩擦角。この値は、リンクと土の縦方向の相互作用に使用されます。 PHI_LONG=PHI*PHI_LONG |
| DELTA_LONG | 土-リンクの内部摩擦角。この値は、リンクと土の縦方向の相互作用に使用されます。 DELTA_LONG=DELTA*DELTA_LONG |
| C_LONG | 土の粒子の凝集力。この値は、リンクと土の縦方向の相互作用に使用されます。 C_LONG=C*C_LONG |
| CA_LONG | 土とグローサーの凝集力。この値は、リンクと土の縦方向の相互作用に使用されます。 CA_LONG=CA*CA_LONG |
| PHI_LAT | 土の内部摩擦角。この値は、リンクと土の横方向の相互作用に使用されます。 PHI_LAT=PHI*PHI_LAT |
| DELTA_LAT | 土-リンクの内部摩擦角。この値は、リンクと土の横方向の相互作用に使用されます。 DELTA_LAT=DELTA*DELTA_LAT |
| C_LAT | 土の粒子の凝集力。この値は、リンクと土の横方向の相互作用に使用されます。 C_LAT=C*C_LAT |
| CA_LAT | 土とグローサーの凝集力。この値は、リンクと土の横方向の相互作用に使用されます。 CA_LAT=CA*CA_LAT |
| CJ1 | 凝集力、JanosiアプローチのC、縦方向。 CJ1=C*CJ1 |
| CJ2 | 凝集力、JanosiアプローチのC、横方向。 CJ2=C*CJ2 |
| PHIJ1 | Janosiの内部摩擦角φ長手方向。 PHIJ1=PHI*PHIJ1 |
| PHIJ2 | Janosiの内部摩擦角φ横方向。 PHIJ2=PHI*PHIJ2 |
| RJ1 | 改良型Janosiのr、長手方向。 RJ1=R_JAN*RJ1 |
| RJ2 | 改良型Janosiのr、横方向。
推奨値: RJ2=-1。 |
| JMAX1 | 改良型Janosiのjmax、長手方向。 JMAX1= JMAX*JMAX1 |
| JMAX2 | 改良型Janosiのjmax、横方向。 JMAX2= JMAX*JMAX2 |
| JULT1 | 改良型Janosiのju、長手方向。 JULT1=JULT*JULT1 |
| JULT2 | 改良型Janosiのju、横方向。 JULT2=JULT*JULT2 |
| AS1 | せん断塑性係数 (0≤AS1≤1)。インデックス1は長手方向を示す。 AS1=AS*AS1 |
| AS2 | せん断塑性係数 (0≤AS2≤1)。インデックス2は横方向を示す。 AS2=AS*AS2 |
| AM1 | グローサー力塑性係数 (0≤AM1≤1)。インデックス1は長手方向を示す。 AM1=AM*AM1 |
| AM2 | グローサー力塑性係数 (0≤AM2≤1)。インデックス2は横方向を示す。 AM2=AM*AM2 |
プロパティファイルの例
$----------------------------------------------------------------MDI_HEADER
[MDI_HEADER]
FILE_TYPE = 'rdf'
FILE_VERSION = 5.00
FILE_FORMAT = 'ASCII'
$---------------------------------------------------------------------UNITS
[UNITS]
LENGTH = 'm'
FORCE = 'newton'
ANGLE = 'radians'
MASS = 'kg'
TIME = 'sec'
$---------------------------------------------------------------------MODEL
[MODEL]
PROPERTY_FILE_FORMAT = 'USER'
FUNCTION_NAME = 'mbdtire::ROADSUB'
METHOD = '3D'
ROAD_TYPE = 'softsoil'
$---------------------------------------------------------------------PARAMETERS
[PARAMETERS]
MU = 1.0 $ Friction coefficient
LENGTH = 300.0 $ Range of soil region in x direction
WIDTH = 5.0 $ Range of soil region in y direction
NODES = 1 $ Number of integration points
MULTIPASS = 'TRUE'
$----------------------------------------------------------------COMMON_SOIL_PROPERTIES
[PROPERTIES]
PHI = 0.65 $ Angle of internal shearing resistance [angle]
C = 800.0 $ Soil apparent cohesion [force/length**2]
KC = 1370.0 $ Pressure-sinkage parameter [force/length**(n+1)]
KPHI = 8.14E5 $ Pressure-sinkage parameter [force/length**(n+2)]
SINKAGE_EXPONENT = 1.0 $ Sinkage exponent n [-]
SOIL_STIFFNESS = 8.14E6 $ Soil elastic stiffness [force/length**3]
SOIL_DAMPING = 500.0 $ Soil damping [force*time/length]
SOIL_DENSITY = 1600.0 $ Soil density [mass/length**3]
KX1 = 0.036 $ Shear deformation module [length]
KY1 = 0.013 $ Shear deformation module [length]
$--------------------------------------------------------------TIRE_SOIL_PROPERTIES
$-Properties used for the tire-soil interaction
$-
KX0 = 0.043 $ Shear deformation module [length/angle]
KY0 = 0.02 $ Shear deformation module [length/angle]
C1 = 0.4 $ Parameter for wheel angle of maximum normal stress [-]
C2 = 0.15 $ Parameter for wheel angle of maximum normal stress [-]
$--------------------------------------------------------------TRACK_SOIL_PROPERTIES
$-Properties used for the Track-soil interaction
$-
R_CASE = 0 $ Report of softsoil input - 0: None, 1: Minimal, 2: Full
WID_OR_MIN = 1 $ Definition of Bekker parameter b - 1: Width, 2: Minimum dimension of link
$--------------------------------------------------------------ADVANCED_TRACK_SOIL_PROPERTIES
$-Advanced Properties used for the Track-soil interaction (OPTIONAL)
DELTA = -0.5 $ Internal angle of soil-grouser friction
CA = -0.5 $ Cohesion between soil and grouser
R_JAN = 0.5 $ r of modified Janosi
JMAX = -0.8 $ jmax of modified Janosi
JULT = -1.5 $ ju of modified Janosi
AS = 0.5 $ Plasticity factor of shearing
AM = 0.5 $ Plasticity factor of grouser force
PHI_LONG = 1.0 $ The internal angle of soil friction.
DELTA_LONG = 1.0 $ The internal angle of soil-link friction.
C_LONG = 1.0 $ The cohesion of the soil particles.
CA_LONG = 1.0 $ The cohesion between the soil and the grouser.
PHI_LAT = 1.0 $ The internal angle of soil friction.
DELTA_LAT = 1.0 $ The internal angle of soil-link friction.
C_LAT = 1.0 $ The cohesion of the soil particles.
CA_LAT = 1.0 $ The cohesion between the soil and the grouser.
CJ1 = 1.0 $ Cohesion C of the Janosi approach, for the longitudinal direction
CJ2 = 1.0 $ Cohesion C of the Janosi approach, for the lateral direction
PHIJ1 = 1.0 $ Angle of internal friction, Φ, of Janosi, for the longitudinal direction
PHIJ2 = 1.0 $ Angle of internal friction, Φ, of Janosi, for the lateral direction
KJ1 = 1.0 $ k of Janosi, for the longitudinal direction
KJ2 = 1.0 $ k of Janosi, for the lateral direction
RJ1 = 1.0 $ r of the modified Janosi, for the longitudinal direction
RJ2 = 1.0 $ r of the modified Janosi, for the lateral direction
JMAX1 = 1.0 $ jmax of modified Janosi, for the longitudinal direction
JMAX2 = 1.0 $ jmax of modified Janosi, for the lateral direction
JULT1 = 1.0 $ ju of modified Janosi, for the longitudinal direction
JULT2 = 1.0 $ ju of modified Janosi, for the lateral direction
AS1 = 1.0 $ The plasticity factor of the shearing 0≤AS1≤1.
AS2 = 1.0 $ The plasticity factor of the shearing 0≤AS2≤1.
AM1 = 1.0 $ The plasticity factor of the grouser force 0≤AM1≤1.
AM2 = 1.0 $ The plasticity factor of the grouser force 0≤AM2≤1.
$----------------------------------------------------------------------GRAPHICS
[GRAPHICS]
ROAD_INCR = 0.050CRG路面データファイル
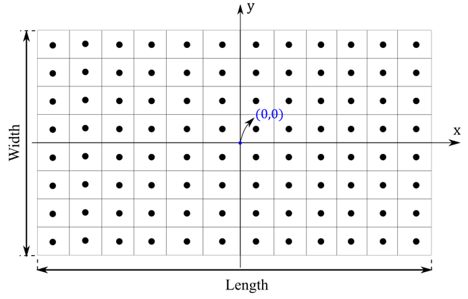
図 2. ユーザー定義の寸法(長さ、幅)の路面モデル
複雑な地形の形状を表すために、軟質土壌路面モデルでは曲面標準グリッド(CGR)ファイルを使用できます。このためには、路面(.rdf)ファイルのPARAMETERSブロックで、属性CRG_FILE=’path to .crg file’を設定する必要があります。
$---------------------------------------------------------------------PARAMETERS
[PARAMETERS]
MU = 1.0 $ Friction coefficient
LENGTH = 300.0 $ Range of soil region in x direction
WIDTH = 6.0 $ Range of soil region in y direction
NODES = 1 $ Number of integration points
MULTIPASS = 'TRUE'
CRG_FILE = '<road_path>.crg'変形可能な路面
MotionViewでは、軟質土壌タイヤモデルを使用してシミュレーションに軟質土壌路面の変形を含めることができます。変形可能な路面のグラフィックはMotionViewでRoad Toolsを使用して作成され、タイヤと軟質土壌のダイナミクスのシミュレーションのため、MotionSolveに送信されます。軟質土壌路面の変形はHyperViewで可視化できます。
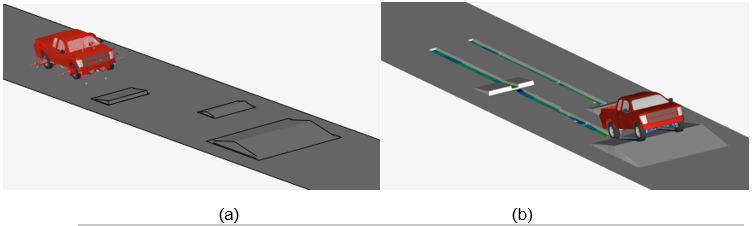
図 3. a) MotionViewの軟質土壌路面グラフィックス、b) HyperViewの変形された軟質土壌路面グラフィックス
Road Toolは、路面プロパティファイル(.rdf)を使用する平坦な路面とCurved Regular Grid(.crg)路面の作成をサポートしています。軟質土壌タイヤモデルで使用できる、障害物の材料に応じて路面と共に変形する異なる障害物タイプを含めることもできます。詳細については、障害物をご参照ください。
路面のポジショニング
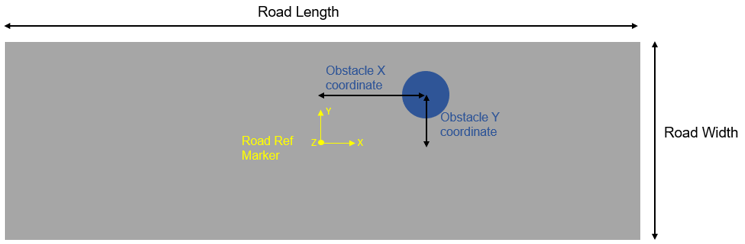
図 4. 路面参照マーカーによる平坦なサーフェスと障害物の配置
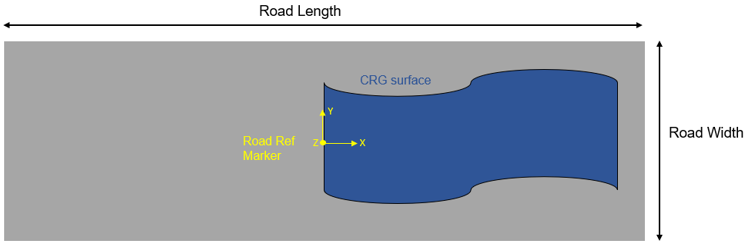
図 5. 変形可能な路面上の路面参照マーカーによるCRGサーフェスの配置
軟質土壌の変形可能な路面の追加と結果の可視化
- 軟質土壌の路面プロパティファイル(.rdf)をRoad Toolsに読み込みます(詳細については、視覚化 - Road Toolsトピックをご参照ください)。 路面プロパティファイルを読み込む際に、選択したバスに.h3dファイルと.mdlファイルが作成されます。MotionViewのモデリングウィンドウに路面グラフィックスが表示され、路面グラフィックスを含むグラフィックシステムがモデルブラウザで定義されます。
図 6. - Tiresエンティティに軟質土壌タイヤと路面のプロパティファイルを追加するか、Track Builderを使用して軟質土壌のクローラ・履帯システムを作成します。
- MotionSolveで解析を実行します。
MotionSolveは、Road Toolsによって作成された路面.h3dを読み込み、追加のSSR(Soft Soil Road)ファイルを生成します。このファイルには実行時に<MotionSolve_result_xml_name>_softsoil_road.ssrという名前が付きます。softsoil_road.ssrには、シミュレーション時に変形された路面グラフィックスの節点に関する情報が格納されます。
- HyperViewで解析をポスト処理します。
シミュレーションの完了後、HyperViewでモデルのアニメーション結果を開きます。