転動体システム
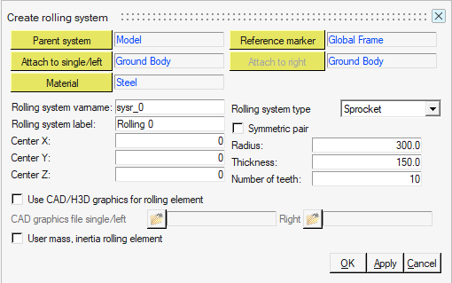
図 1. Create rolling systemダイアログ
Track Builderでは、Sprocket、Double Sprocket、Idler、Roller、Wheel、Double Wheelという6つの異なる転動体システムを使用できます。
- Sprockets / Double Sprocket
- 履板に噛み合う歯(コグ)を持つ形状のホイール。
- Idler
- 履板の軌道の変更、ラップ角を大きくするのに使用するホイール。
- Roller
- 履板のカテナリ部の垂れ下がりを防ぎ、履板の荷重を支えるための小型ホイール。
- Wheel / Double Wheel
- 車両重量を履板に伝達します。
symmetric pairオプションを使用して、X-Z平面に対して対称なペアとして表される2つの転動体システムを作成できます。
注: 作成されたペアシステムは、MotionViewのペアエンティティではなく、対称平面に複製され配置されたシステムです。Symmetric pairオプションは同じ履板のダブルシステムのリプレゼンテーションには推奨されません。このリプレゼンテーションが必要な場合は、Symmetric pairオプションによるシングルホイールではなく、Double SprocketまたはDouble Wheelを使用します。
転動体は、プリミティブなジオメトリを組み合わせて作成します。Use CAD/H3D graphics for rolling elementオプションにより、CADまたはH3Dグラフィックスを転動体システムに追加できます。Symmetric pairオプションに基づき、CADグラフィックスは転動体の左側または右側に追加できます。
注: 転動体システムにCADグラフィックスを正しく配置するには、転動体システムに含める前に、CADグラフィックスの中心がグローバル原点(XYZ座標の0,0,0)に配置されているのを確認することが重要です。
転動体システムの質量と慣性は、提供されたジオメトリ寸法またはCADグラフィックスに基づいて計算されます。または、User mass, inertia rolling elementオプションを使用してユーザー定義の質量と慣性を入力することもできます。この場合、質量と慣性のプロパティを含めるために、転動体システムのボディを編集する必要があります。
転動体システムのプロパティは、システム作成後のrolling systemの下のデータセットで変更することができます。