IP衝突
IP衝突のツールを使用して、FMVSS201およびECE-R21規制に従って、計器盤(IP)のテスト領域を自動的に計算し、ヘッドフォームインパクターを配置し、選択されたすべての衝撃位置に対応する、すぐに実行できるソルバーデックをエクスポートします。
図 1.
IPマーキング
-
ガイドバーの
 をクリックして、マーキングオプションを定義します。
をクリックして、マーキングオプションを定義します。
- Method
- マーキング方法:
- Vehicle Front Axis
- 車両の-Xまたは+Xの向き。
- Regulation
- マーキング時に従う規制:FMVSS201またはECE-R21。
- H-Point Offset
- シート参照点オフセットを定義する方法:
- Target Points
- ターゲットポイントの位置を定義する方法:
- Intermediate Curves
- 衝撃ゾーンの上限と下限の間に追加のカーブと衝撃位置を作成します。
- LHS Area Limit
- 規制に沿った衝撃ゾーンの左限。
- RHS Area Limit
- 規制に沿った衝撃ゾーンの右限。
- Arm Length
- 振り子の位置パラメータの計算に使用されるアーム長さ。
- Min Length
- 規制に沿った衝撃ゾーンの下限に対する最小振り子アーム長さ。
- Max Length
- 規制に沿った衝撃ゾーンの下限に対する最大振り子アーム長さ。
- Headform Dia
- 規制に沿ったヘッドフォーム直径。
- Rotation Step
- IP上にラインを作成するための、2つの振り子位置間の回転角度。
-
AutomaticとManualの手法の場合は、必要なエンティティを選択します。
 および
および をクリックし、マーキングプロセスのエンティティタイプを順に切り替えます。
をクリックし、マーキングプロセスのエンティティタイプを順に切り替えます。 -
ガイドバーの端にあるをクリックして、IP Positioningワークフローに移動します。
自動マーキング
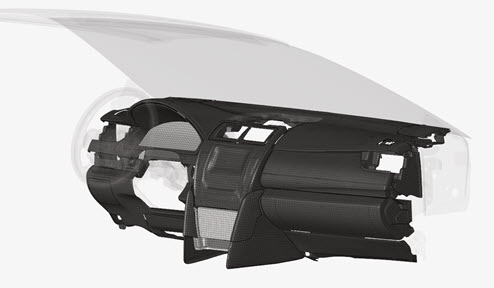
図 2. 計器盤コンポーネント
規定で定められた衝撃領域の限界値を算出するため、ハンドルとフロントガラスを選択することができます。
マーキングのワークフローの最後には、以下のエンティティが作成されます:
- ジオメトリライン
- 影響領域の上限と下限の定義
-
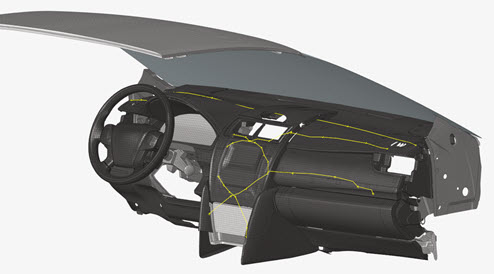
図 3. ジオメトリライン - 領域サーフェス
- FMVSS201規定の上限でのコンストラクションの定義。
-
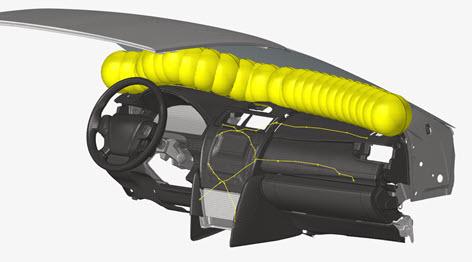
図 4. 上限ラインのコンストラクション領域 - プレーン
- 規定に沿った衝撃領域の右限と左限の定義。
-
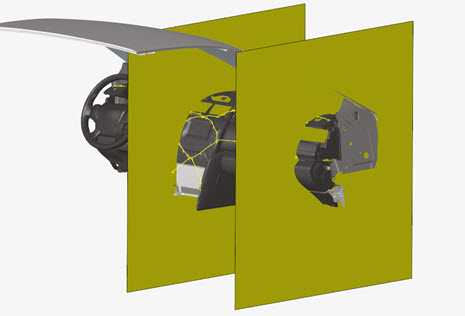
図 5. 右限と左限の平面 - インパクターのジオメトリ
- 衝撃領域ラインの作成に使用されるインパクターの位置の定義。
-
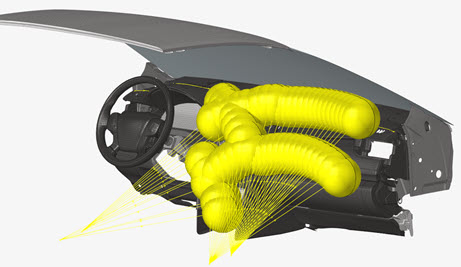
図 6. ラインコンストラクションのためのインパクターの位置 - 設計ポイントエンティティ
- 計算された衝撃位置でのエンティティの定義。
-
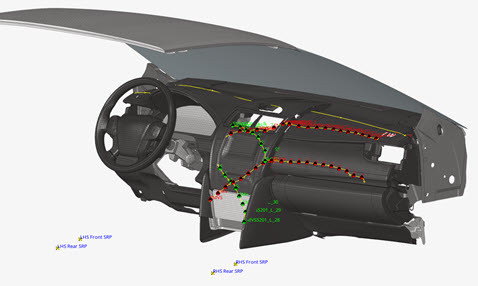
図 7. 衝撃位置のターゲットポイントエンティティ - インパクターのジオメトリ
- 指定のArm Lengthで事前計算されたインパクター位置の定義。
-
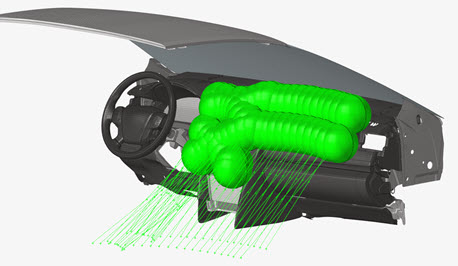 図 8. 指定のArm Lengthのインパクター位置
図 8. 指定のArm Lengthのインパクター位置
図 9.
手動マーキング
手動マーキングを使用すると、IP上の選択された位置に設計ポイントエンティティを作成できます。設計ポイントエンティティの最小メタデータは、オプションメニューで指定できます。
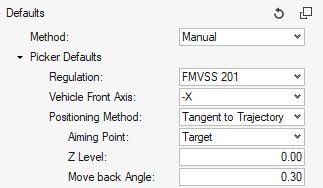
図 10.
ガイドバーから衝撃位置を選択します。Markをクリックして、設計ポイントエンティティを自動生成します。

図 11.
Test Labマーキング
Test Labマーキングを使用すると、テストラボが提供可能な衝撃位置の情報を含むCSVファイルを直接読み取ることができます。
OptionsメニューオプションからCSVファイルを選択し、Markをクリックして、定義した位置に設計ポイントエンティティを自動的に作成します。
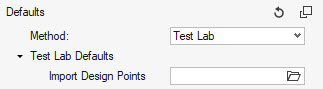
図 12.
CSVファイルの例:

図 13.
IPポジショニング
マーキングプロセスでの設計ポイントの作成後、Positioningワークフローを使用して以下を実行します:
- 選択したすべての設計ポイントのインパクターの位置を計算します。
- インパクターの位置を表示します。
- 選択したすべての設計ポイントに対応する、すぐに実行できるソルバーデックをエクスポートします。
-
ガイドバーのをクリックして、位置を定義し、デックオプションをエクスポートします。
- Vehicle Front Axis
- 車両の-Xまたは+Xの向き。
- Positioning Method
- 次のポジショニング方法から選択します:
- Transformation Type
- インパクター位置に対して、次のソルバー変換定義から選択します:
- Main File
- デック生成のために使用されるメイン入力デックへのファイルパス。
- Headform File
- メイン入力デックでインクルードファイルとして使用されるヘッドフォーム入力デックへのファイルパス。
- Output Directory
- 選択されたシミュレーション対象の衝撃位置のすべてのソルバーデックが作成されるディレクトリ。
- Design Point name for the directories and include file name
- このオプションでは、サブフォルダーとソルバーデックの名前の作成に設計ポイントエンティティの名前を使用します。
- Create a folder for each design point in Export Directory
- このオプションがオンの場合は、Output Directory位置にある選択されたターゲットポイントごとにサブフォルダーが作成されます。オフの場合は、すべてのメインデックとインクルードがOutput Directory位置に記述されます。
-
必要なエンティティを選択します。
およびをクリックし、配置プロセスのエンティティタイプを順に切り替えます。
-
ガイドバーの端にあるをクリックし、IP Markingワークフローに移動します。
ヘッドフォームモデルの前提条件
このツールでは、振り子ヘッドフォームと線形ヘッドフォームを配置できます(Normal to Targetポジショニング)。
どちらの場合も、X軸が移動方向を指す、ヘッドフォームの中心を原点とする座標系を定義する必要があります。
このツールでは速度は自動的に生成できないため、インパクターモデルで定義する必要があります。
ポジショニング方法
Tangent to Trajectory
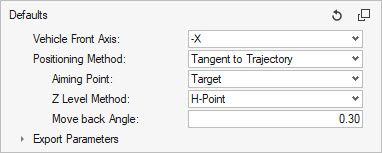
図 14.
この方法を選択すると、ヘッドの中心の円形軌道上のターゲット位置にヘッドフォームが配置されます。
Aiming Pointは、TargetまたはContactのいずれかのポイントになります。
Z Level Methodは、ヘッドフォームのピボットのZ座標を固定します。デフォルトでは、H-Point Z座標(= Design Pointメタデータのシート参照点Z座標)に設定されます。User定義に切り替えて、値を指定することもできます。
計器盤との交差を避けるようにインパクター位置が計算されると、Move back Angleが適用されます。
選択した設計ポイントエンティティに定義されているメタデータは無視され、このポジショニング方法で計算された値で上書きされます。
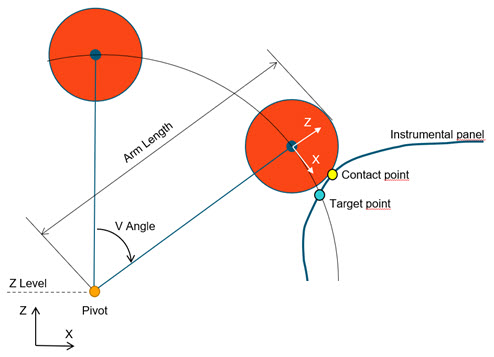
図 15. Tangent to Trajectoryポジショニング
Normal to Trajectory
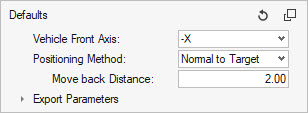
図 16.
この方法を選択すると、ヘッドフォームの中心を原点とする座標系のX軸上にあるターゲット位置でIPに垂直になるようにヘッドフォームが配置されます。
IPに垂直なベクトルは、ターゲット位置にある周囲の要素によって決まります。
ピボット節点の選択は要求されません。
計器盤との交差を避けるようにインパクター位置が計算されると、Move back Distanceが適用されます。
選択した設計ポイントエンティティに定義されているメタデータは無視され、このポジショニング方法で計算された値で上書きされます。
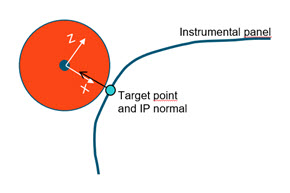
図 17. Normal to Trajectoryポジショニング
Pivot/Angles
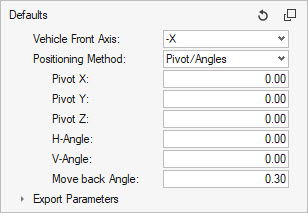
図 18.
この方法を選択すると、振り子ピボットを指定の(Pivot X、Pivot Y、Pivot Z)位置に移動し、グローバルY軸周りにV-Angleと変換済みX軸(X’)周りにH-Angleの角度の回転を連続して適用することにより、ヘッドフォームが配置されます。
計器盤との交差を避けるようにインパクター位置が計算されると、Move back Angleが適用されます。
ピボットと角度は入力として直接指定するため、ターゲットポイントは必ずしもヘッドフォームの軌道上にあるとは限りません。
選択した設計ポイントエンティティに定義されているメタデータは無視され、上書きされます。
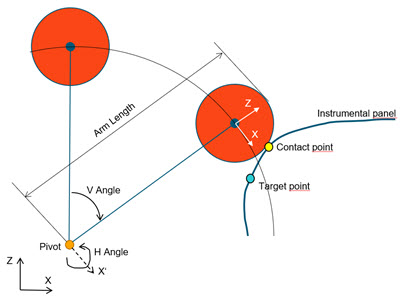
図 19. Pivot/Anglesポジショニング
Target/Angles
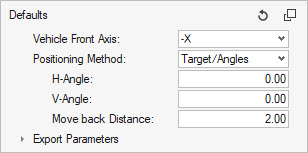
図 20.
この方法を選択すると、ターゲットポイント位置周りにHおよびVの角度の回転を適用することにより、ヘッドフォームが配置されます。
ピボット位置は入力するのではなく、両方の角度を適用した結果です。
計器盤との交差を避けるようにインパクター位置が計算されると、Move back Distanceが適用されます。
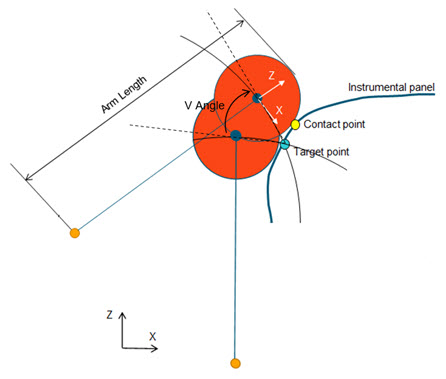
図 21.
Automatic

図 22.
この方法を選択すると、設計ポイントエンティティで定義されている位置パラメータに従って、ヘッドフォームが配置されます。
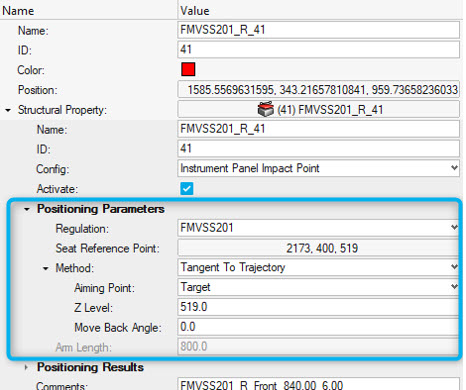
図 23.
ソルバーデックのエクスポート
このツールを使用すると、すべての衝撃位置に対応する、すぐに実行できるソルバーデックをエクスポートできます。
IP Positioningワークフローで、Export Parametersに情報を指定します。
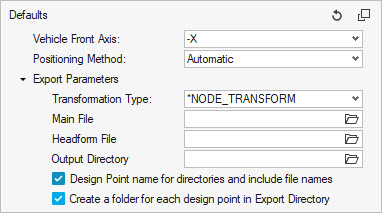
図 24.
Main Fileはユーザー定義のメイン入力デッキで、最終モデル(IPモデル、接触、コントロール、境界条件など)のインクルード構造が含まれています。
LS-DYNAのMain Fileの例を次に示します:
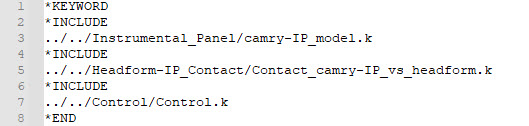
図 25.
また、Radiossの例を次に示します:
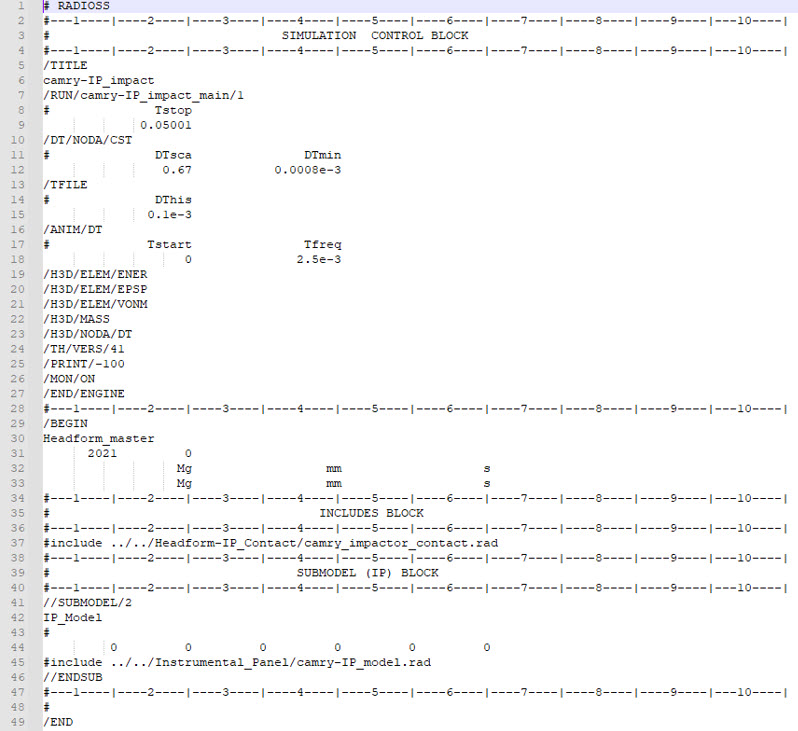
図 26.
Headform Fileは、デックのエクスポート中、Main Fileのインクルードとしてツールで定義されるヘッドフォームモデルを指します。
Output Directoryは、各衝撃位置のすべてのソルバーデックが書き込まれる場所です。
エクスポートプロセス中、ツールでは、Transformation Typeを使用して、インパクター上で適用する変換を含む追加のインクルードファイルが生成されます。
このツールで生成されたインクルードファイルの配置例は、次のとおりです:
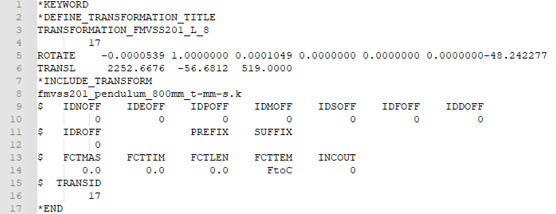
図 27. LS-DYNA
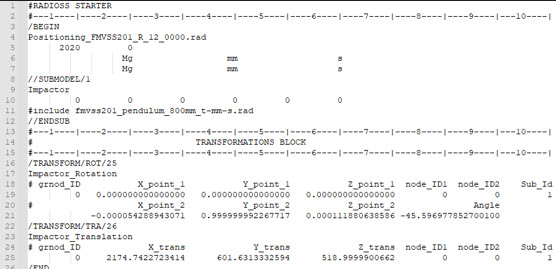
図 28. Radioss
最後に、配置ファイルがインクルードファイルとして自動的にMain Fileに追加されます。衝撃位置ごとに結果として生成されるモデルファイルは、次のようになります:
- FMVSS201_L_8.k
- fmvss201_pendulum_800mm_t-mm-s.k
- Positioning_FMVSS201_L_8.key
- fmvss201_pendulum_800mm_t-mm-s.rad
- FMVSS201_R_12_0000.rad
- Positioning_FMVSS201_R_12_0000.rad