Use the Move tool to translate, rotate, and
position selected entities.
Certain types of entities, like assemblies, cannot be moved with the Move tool. Entities like pressures
cannot be moved because their position and orientation are determined by the entity to which they are applied.
From the Home tools, click the Move tool.
Figure 1.
The default move mode is set to Interactive.
Note: In
HyperMesh, the Move tool is part of a ribbon group menu
along with the Transformation, Mirror, and
Scale tools. Click the arrow besides
the icon to view the tool if it is not currently active.
Optional: Click on the guide bar to define movement options.
Select an entity type using the guide bar selector.
Select entities to move.
The Move tool is placed the center of selected
entities.
Click a graphical manipulator then do one of the following:
Drag the graphical manipulator to translate or rotate entities in the selected direction(s).
Enter a precise value in the microdialog and
press Enter.
To
Do This
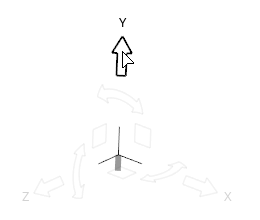
Translate along an axis
Click the X, Y, or Z arrow. Figure 2.
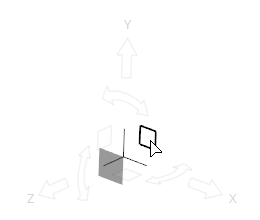
Translate along a plane
Click the XY, XZ, or YX plane square. Figure 3.
Translate freely in 3D space
Click the origin of the Move
tool. Figure 4.
Tip: Use the icons in the microdialog to align the tool to a
part or the global axes.
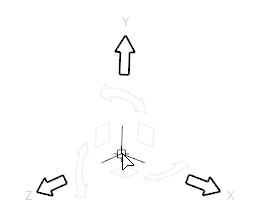
Rotate around an axis
Click a curved arrow. Figure 5.
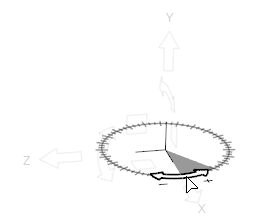
Rotate freely
Click at the tip
of the X, Y, or Z arrow and drag. Figure 6.
Tip: Use snap points to align entities by
clicking-and-dragging a snap point on one entity
to the snap point on a second entity.
Reposition the Move Tool
Reposition the Move tool along an axis, within a plane,
or in 3D space to change the center of rotation.
From the Home tools, click the Move tool.
Figure 7.
The default move mode is set to Interactive.
Note: In
HyperMesh, the Move tool is part of a ribbon group menu
along with the Transformation, Mirror, and
Scale tools. Click the arrow besides
the icon to view the tool if it is not currently active.
Enter editing mode in the following ways:
Hold Shift.
Double-click one of the graphical manipulators.
The Move tool becomes orange, indicating
that it is ready to be repositioned.
Similar to translating and rotating, use the graphical manipulators and
microdialogs to reposition the tool.
Let go of Shift or left-click in empty space to exit
editing mode.
The Move tool displays in
white.
Microdialog Options
When clicking the Move tool origin:
Align the Move tool its default orientation and
position:
Click once to reset its orientation to match the global
coordinate system, or local system if one is assigned.
Click twice to also reset its position to the centroid of your
selection, or the local system origin if one is assigned.
Align the Move tool along an edge or face. If
the Move tool is being repositioned
(highlighted orange), clicking this button will force the Move tool to be aligned automatically as you drag it
around the model.
Select and assign a local coordinate system to the Move tool. After a new system is assigned, the
Move tool automatically repositions to its
origin.
Note: Currently, the Move tool only supports assigning rectangular
coordinate systems.
Tip: When a local system is assigned to the
Move tool, the system button is shown with a tick
mark , indicating that the manipulator is now in local
system mode. Clicking this button again to change the assigned system or reset
it to go back to global system mode.
When clicking a translation or rotation arrow:
Orient the selected direction using the Vector
tool.
Δ
Use the buttons to apply an incremental translation
or rotation in the selected direction.
Tip: When using the Vector tool to define an orientation between two snaps,
the Δ increment field is also automatically populated with the corresponding
distance.
Collision Detection
Prevent components from passing through other components.
Restriction: Only available for components.
The default behavior of the Move tool allows components to
pass through each other and overlap uninhibited. Figure 8.
When the collision detection option is activated, an attempt to collide two
components by moving one of them results in the component stopping at or before the
point of collision. If you attempt to drag the component past this position, it
remains in the non-penetrating position and the feature edges of the component that
is blocking the motion are highlighted orange. If you continue to drag the component
all the way through the blocking component, the dragged component will move once
again until it encounters another collision. Figure 9.
Position Entities using Position Mode
Position entities by specifying source and target locations.
Change the position of the selected
entities by picking one, two, or three source and target location pairs. The source
locations represent starting reference points, which will be matched with their
corresponding targets to produce a transformation. The transformation performed is a
combination of translation and rotation procedures that is applied to the selected
entities until they are relocated.
From the Home tools, click the Move tool.
Figure 10.
From the guide bar, change the mode from Interactive to
Position.
From the guide bar, click Source
and select up to three source locations in the modeling window.
Select Target and select an equivalent number of target
locations in the modeling window.
Optional: Click and select
Show preview to preview the updated position.
On the guide bar, complete one of the
following:
Click to apply and stay in the tool.
Click to apply and close the tool.
Click to exit the tool without applying.
Selecting one pair of source and target
locations directly translates the selected entities from S1 to T1. Figure 11.
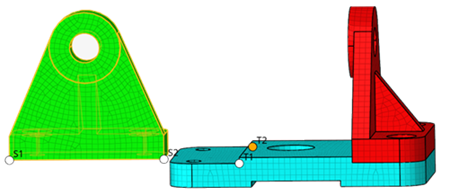
Selecting two pairs of source and target locations translates the selected
entities from S1 to T1. The entities are then rotated around S1, until S2 and T2 are
aligned along the same vector (Using S1 as the vector’s origin). Figure 12.
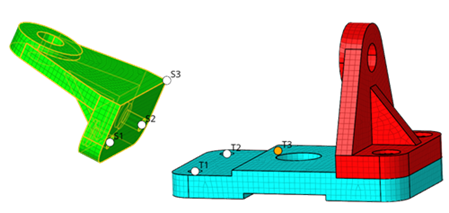
Selecting three pairs of source and target locations translates the selected
entities from S1 to T1. The entities are then rotated around S1, until S2 matches with
T2. Lastly, the entities are rotated around the (T1, T2) axis until the S3 and T3
locations are in the same plane. Figure 13. Figure 14. Result
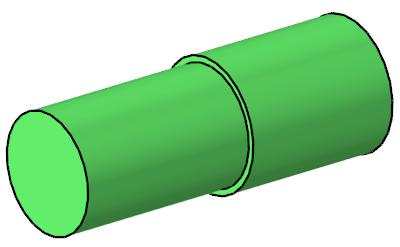
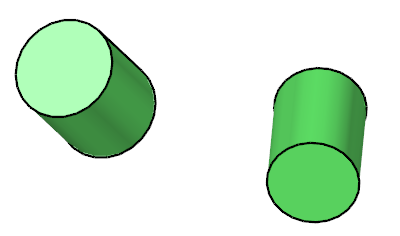
Example: Align Two Solids
The following example takes a look at two cylinders with
the goal of aligning their faces. Figure 15.
From the Home tools, click the Move tool.
Figure 16.
Set the selector to Solids then pick the cylinder on the
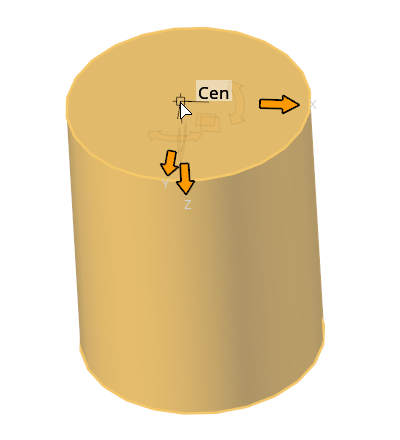
left.
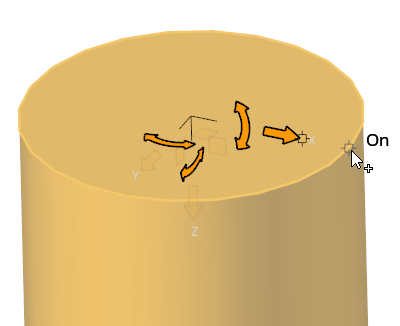
Align the tool with the cylinder's face.
Double-click on the origin of the axis to enter editing mode and
reposition the tool.
Drag the origin of the axis to the snap point on the center of the
cylinder's face.
Figure 17.
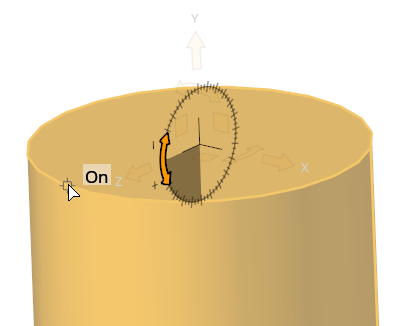
Click at the tip of the X arrow and drag to a
snap point on the face's edge.
Figure 18.
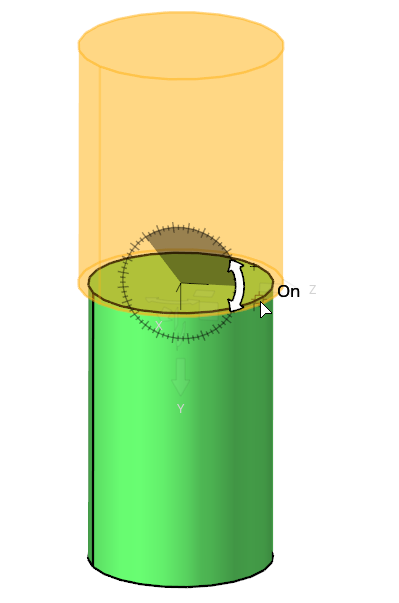
Drag the Z axis' curved arrow to a similar snap point on the face's
edge.
By rotating this axis, you lock the other two degrees of freedom.
Figure 19.
Left-click in empty space to exit editing mode.
Tip: It is also possible to automatically align the tool to the
selected part by clicking in the microdialog. This works well in many cases, but the
result depends on the position and geometry of the selected parts; so for
complex scenarios, manually repositioning the origin and axes (as shown
above) is a more dependable way of aligning the Move tool.
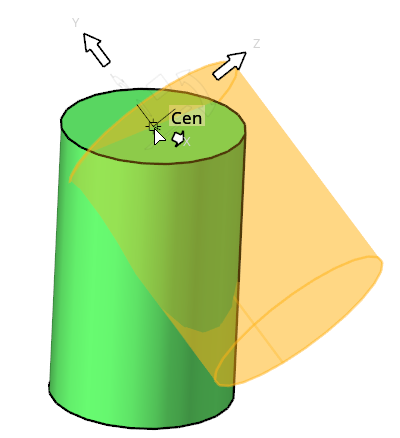
Translate and rotate the cylinder so it aligns with the other.
Drag the origin of the axis to the snap point on the surface center of
the other cylinder.
Figure 20.
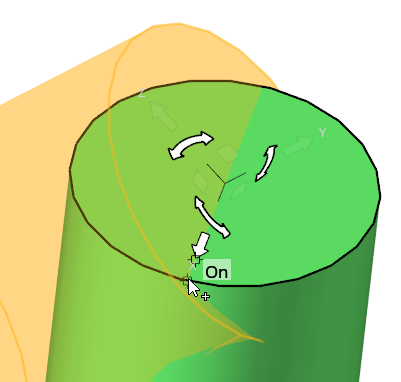
Click at the tip of the X arrow and drag to a
snap point on the target face's edge.
Figure 21.
Drag the Z axis' curved arrow to a similar snap point on the target
face to finish the alignment.

 on the guide bar to define movement options.
on the guide bar to define movement options.
 at the tip
of the X, Y, or Z arrow and drag.
at the tip
of the X, Y, or Z arrow and drag. 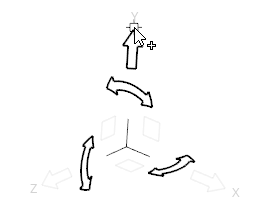



 , indicating that the manipulator is now in local
system mode. Clicking this button again to change the assigned system or reset
it to go back to global system mode.
, indicating that the manipulator is now in local
system mode. Clicking this button again to change the assigned system or reset
it to go back to global system mode.
 buttons to apply an incremental translation
or rotation in the selected direction.
buttons to apply an incremental translation
or rotation in the selected direction.

 to apply and stay in the tool.
to apply and stay in the tool. to apply and close the tool.
to apply and close the tool. to exit the tool without applying.
to exit the tool without applying.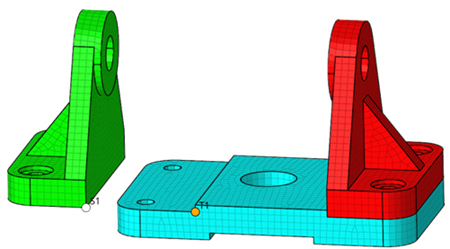
 at the tip of the X arrow and drag to a
snap point on the face's edge.
at the tip of the X arrow and drag to a
snap point on the face's edge.