乗用車とトラックの空気力学
基本的なアプローチ
Manfred MitschkeとHenning Wallentowitz 1が提唱する空気力学の概念を以下に示します。
結果として生じる空気力と空力トルクは、4つのホイールの中心にある路面上に配置された基準点Ocに作用すると見なされます。
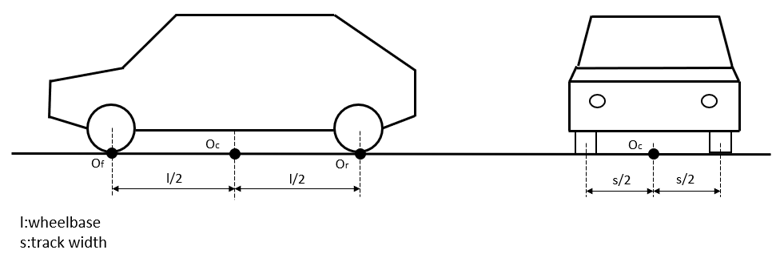
図 1.
Fa,x = cx(τL)*P(vr)
Fa,y = cy(τL)*P(vr)
Fa,z = cz(τL)*P(vr)
Ma,x = cmx(τL)*l*P(vr)
Ma,y = cmy(τL)* l*P(vr)
Ma,z = cmz(τL)* l*P(vr)
ここで、ciは空力係数、τLは相対気流入射角、vrは結果として生じる速度、Pは動圧、およびlはホイールベースです。
上で定義した力とトルクの成分が適用される座標系は、Ocに配置され、車体に固定されます。
速度について
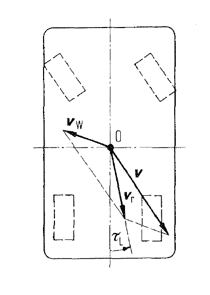
図 2.
P(vr)について
動圧は、空気密度ρ、結果として生じる速度vr、および次の式を使用して計算できます。
P(vr) = 0.5 * ρ * vr2
空気密度は、環境の周辺温度や周辺圧力に依存し、多くの場合は一定と見なされる、空気の理想的な気体定数です。
垂直力とピッチトルク
垂直力Fa,zとピッチトルクMa,yは、cz,fとcz,rを取り込む地表レベルにあるサスペンションの中心点OfとOrに作用する2つの垂直力に置き換えられます。
Fa,zf = cz,f(τL)*P(vr)
Fa,zr = cz,r(τL)*P(vr)作用力は、4輪の中心とサスペンションの中心Of とOr 地面の高さにある路面上の基準点Oc にかかります。
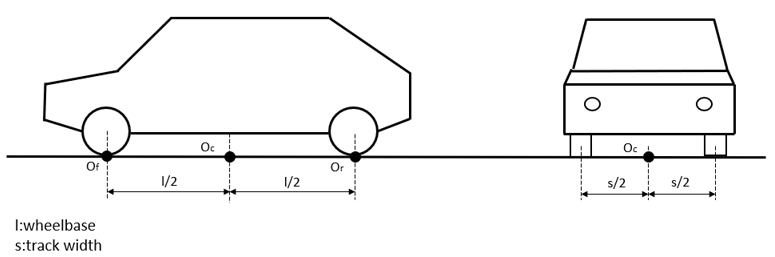 図 3.
図 3. この空力システムは、Car and Truckライブラリのアセンブリウィザードのデフォルト設定です。
空力とトルクの完全なセットは、次のように車両剛体に適用することができます:
Fa,x = 0.5*cx(τL)* ρ * A* vr2
Fa,y = 0.5*cy(τL)* ρ * A* vr2
Fa,zf = 0.5*cz,f(τL)* ρ * A* vr2
Fa,zr = 0.5*cz,r(τL)* ρ * A* vr2
Ma,x = cmx(τL)* l* ρ * A* vr2
Ma,z = cmz(τL)* l* ρ * A* vr2
ここで、Aは車の前面面積です。車両前面面積は、通常、乗用車の場合は1.5 m2 < A < 2.5 m2の範囲、トラックやバスの場合は4 m2 < A < 9 m2の範囲です。
ciの決定方法
非常に大まかな概算として、ciは定数と見なすことができ、空気力を完全に無効にするには、すべてのciを0に設定できます。
| τL =0deg | τL =10deg | τL =20deg | τL =30deg | |
|---|---|---|---|---|
| cx | 0.3 | 0.31 | 0.32 | 0.33 |
| cy | 0 | 0.4 | 0.8 | 1.2 |
| cz,f | 0.1 | 0.2 | 0.3 | 0.4 |
| cz,r | 0 | 0.1 | 0.2 | 0.3 |
| cmx | 0 | 0.03 | 0.06 | 0.09 |
| cmz | 0 | 0.04 | 0.08 | 0.12 |
この表を使用する場合の制限は、車が30度(いくつかのケースでは40度)を超える斜め気流を受ける状況が許可されないことです)。このような状態、特に、純粋な横風の状態については、今後のリリースで実装が考慮される予定です。
ci係数は、仮想風洞実験によっても導出できます。このような実験で測定された値が、vrおよびτの関数として、Oc、Orにおける拘束力になります。