/RWALL
ブロックフォーマットキーワード 無限平面、無限円筒、球形、および平行四辺形の剛壁を定義します。
フォーマット
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /RWALL/type/rwall_ID/unit_ID | |||||||||
| rwall_title | |||||||||
| node_ID | Slide | grnd_ID1 | grnd_ID2 | ||||||
| Dsearch | fric | ϕ | ffac | ifq | |||||
node_ID = 0の場合
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| XM | YM | ZM | |||||||
node_ID ≠ 0の場合
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| Mass | VX0 | VY0 | VZ0 | ||||||
typeがPlane、Cyl、Paralの場合
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| XM1 | YM1 | ZM1 | |||||||
typeがParalの場合
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| XM2 | YM2 | ZM2 | |||||||
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| type | 剛壁タイプのキーワード (下の表をご参照ください) |
|
| rwall_ID | 剛壁の識別子 (整数、最大10桁) |
|
| unit_ID | 単位識別子。 (整数、最大10桁) |
|
| rwall_title | 剛壁のタイトル (文字、最大100文字) |
|
| node_ID | 節点識別子(移動剛壁) (整数) |
|
| Slide | スライディングフラグ。
(整数) |
|
| grnd_ID1 | 剛壁に追加するセカンダリ節点を定義する節点グループ (整数) |
|
| grnd_ID2 | 剛壁から削除するセカンダリ節点を定義する節点グループ (整数) |
|
| Dsearch | セカンダリ検索の距離 (実数) |
[m] |
| fric | 摩擦 (実数) |
|
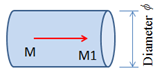
| ϕ | 球の直径 (実数) |
[m] |
| ffac | フィルタリング係数 デフォルト値はifqフラグに依存します (実数) |
|
| ifq | フィルタリングフラグ 5
デフォルト = 0(整数) |
|
| XM | MのX座標 (実数) |
|
| YM | MのY座標 (実数) |
|
| ZM | MのZ座標 (実数) |
|
| Mass | 剛壁の質量 8 質量が入力されていない場合、剛壁は一定の強制速度を有するようになります。 (実数) |
[kg] |
| VX0 | X方向の初速度 (実数) |
[ms] |
| VY0 | Y方向の初速度 (実数) |
[ms] |
| VZ0 | Z方向の初速度 (実数) |
[ms] |
| XM1 | M1のX座標 (実数) |
|
| YM1 | M1のY座標 (実数) |
|
| ZM1 | M1のZ座標 (実数) |
|
| XM2 | M2のX座標 (実数) |
|
| YM2 | M2のY座標 (実数) |
|
| ZM2 | M2のZ座標 (実数) |
剛壁タイプ
- タイプ
- 内容
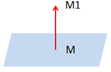
- PLANE
- ˉ∞ 平面
- CYL
- ˉ∞ 右記の直径の円柱; ϕ
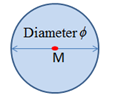
- SPHER
- 右記の直径の球; ϕ
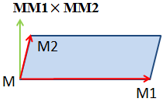
- PARAL
- 平行四辺形
サーフェス入力タイプ
- タイプ
- 内容
- PLANE
- MM1は法線方向を定義します。
-
- CYL
- MM1は円柱の軸を定義します。
- SPHER
- Mは球の中心です。
- PARAL
- MM1 と MM2 は平行四辺形を定義
コメント
- 剛壁を定義するために最初に入力するのは、ポイントMの座標です。移動剛壁の場合は、node_IDを入力します。
- 次に入力するのはポイントM1の座標で、ポイントM2も入力できます(移動壁の場合、M1およびM2のモーションはnode_IDと同じになります)。
- 剛壁のセカンダリ節点は、節点のグループや初期段階で剛壁からDsearchほど下にある節点として定義できます。
- 摩擦フィルタリングオプションは、摩擦を伴ってスライドする剛壁に対してのみ使用できます(Slide=2)。
- フィルタリングフラグifg
ifq ≠ 0の場合、接触部内の各セカンダリ節点における接線摩擦力は、次の単純なルールを使用してフィルタリングされます:
(1) FTf=αFT(t)+(1−α)FTf(t−dt)ここで、- FTf
- フィルタリングされた接線力。
- FT(t)
- フィルター前の時間tにおける計算された接線力。
- FTf(t−dt)
- 前の時間ステップでフィルタリングされた接線力
- t
- 現在のシミュレーション時間
- dt
- 現在のシミュレーション時間ステップ
- α
- フィルタリング係数
フラグifqは、フィルタリング手法である 係数を定義します。
ifq =1の場合、フィルタリング係数はユーザーが直接入力します: α=ffac
ifq =2の場合、はユーザー定義周波数(タイムステップ数を単位として定義された周波数)の3dBフィルタリングレベルに対応します:(2) α=2πNここで、 1freq=T=Ndt 、 N=ffac
ifq =3の場合、はユーザー定義周波数の3dBフィルタリングレベルに対応します:(3) α=2πdt⋅freqここで、- dt
- 時間ステップ
- freq
- ffac
- 球(SPHER)と平行四辺形(PARAL)は無限ではありません。平行四辺形では、以下を使用して法線を定義します:
(4) MM1×MM2と球の直径は、ϕ を使用して定義します。
- 剛壁セカンダリ節点の節点板厚は考慮されません。
- MASS=0または空白の移動剛壁の場合、剛壁は一定の強制速度を有し、初期速度はありません。