理論と式
エンジンとクラッチは、ICエンジンパワートレイン内の数式としてモデル化されます。エンジンの状態はエンジンスピードによって決定され、クラッチの状態はクラッチスリップによって決定されます。このセクションでモデルの記述に使用されるシンボルのリストを以下に示します。
| エンジンスピード(状態) |  |
| クラッチスリップ(状態) |  |
| クラッチトルク |  |
| エンジントルク |  |
| クラッチクランプ力係数 |  |
| Engine Inertia |  |
| Clutch Stiffness |  |
| Clutch Damping |  |
| トランスミッションRPM | |
| Clutch Capacity |  |
エンジンモデル
エンジンは、現在のスロットル位置(入力)とエンジンスピード(状態)に基づいてトルクを生成するブラックボックスとしてモデル化されます。エンジンのすべての回転コンポーネントの回転慣性は、一括してで表現されます。エンジンの回転コンポーネントを加速するためのトルクは、エンジンが生成するトルクとクラッチによる反作用トルクの差です。したがって、エンジン状態(スピード)の導関数は次のように与えられます:
エンジントルクは次のようになります:

これは.pwrファイルの入力である3Dスプラインから補間されます。
クラッチモデル
クラッチは、クラッチ要求入力信号に基づいてエンジンからギアボックスにトルクを伝達することが可能な剛性の高いスプリングおよびダンパーとしてモデル化されます。出力クラッチトルク()が、ギアボックスへの入力になります。
クラッチの状態は、クラッチスリップ()によって定義されます。クラッチトルクは次の方程式によって決定されます:
と+の間でさらに飽和されます。CFFはClamp Force Factor(クランプ力係数)の略で、下の図に示すようなステップ関数(クラッチスケーリング = 1.0とする)を通してクラッチ要求を実行することによって決定されます。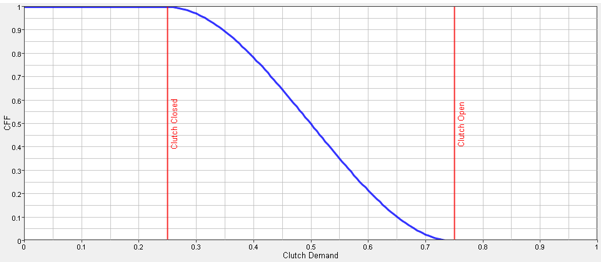
図 1.
クラッチ要求は、クラッチペダルに対するドライバーの入力です。クラッチ要求は無次元であり、0のクラッチ要求はドライバーがクラッチペダルから足を離していることを表し、1のクラッチ要求はドライバーがクラッチペダルを床まで踏み込んでいることを表します。クラッチスリップ状態の導関数は、次の方程式によって決定されます:

ここで、AWCは後述するアンチワインドアップコンポーネントです。
アンチワインドアップシステム
クラッチを切り離してから再び接続すると、一部のクラッチスリップがクラッチ内に残り、切り離してもクラッチスリップが0以外の値で保持されます。ただし、実際のシミュレーションでは、切り離されている間プレートはフリーとなり、切り離し後の有限時間( )内にクラッチスリップは0に戻ります。これをシステム内でモデル化する必要があります。そのため、クラッチスリップを0に戻すAWCコンポーネントがクラッチスリップの導関数に組み込まれています。
)内にクラッチスリップは0に戻ります。これをシステム内でモデル化する必要があります。そのため、クラッチスリップを0に戻すAWCコンポーネントがクラッチスリップの導関数に組み込まれています。
アンチストールシステム
レブリミッター
レブリミッターは、レブリミッターフラグモデルパラメータに基づいてパワートレイン内でオンとオフを切り替えることが可能なオプションシステムです。このシステムは、エンジンスピードが制限を超えたときにスロットルをカットすることによって、エンジンスピードがエンジンのレブリミットを超えないようにします。