Limited Slip Differential(LSD)
MotionView車両ライブラリ内のLSD
MotionViewのCar/Small truckおよびHeavy truckライブラリでは、スリップ制限をモデル化するために左右のドライブシャフト間で粘性カップリングが使用されています。
LSDは、Assembly Wizardを使用して車両モデルを構築するときに含めることができます。“Additional Systems for Full Vehicle with driver model”ページで、Front diff lockまたはRear diff lock(あるいは両方)を選択します。
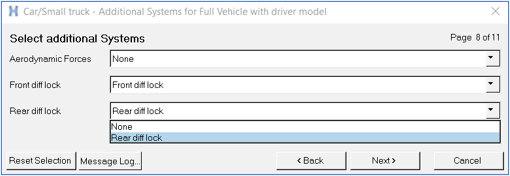
図 1. 4WDコンフィギュレーションのデフロックの選択
図 1. 4WDコンフィギュレーションのデフロックの選択
モデルを構築すると、それぞれのアクスルの駆動システムでデフロックシステムが作成されます。
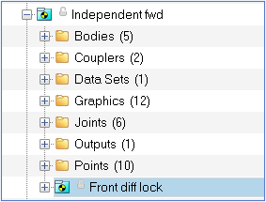
図 2. 駆動システム内のデフロック
図 2. 駆動システム内のデフロック
LSD Model
制限されたスリップデファレンシャルは、単純な回転力 / トルクを使用してモデル化します。トルクは以下の関数の式です:
- 減衰係数(DAMP_COEFF)
- シャフトの回転速度のデルタ(OMEGA_DIFFERENCE)
- シャフトの回転速度間の目的の許容差(ALLOWABLE_SPEED_DIFFERENCE)
- トルクのロックのOn/Offの切替えに使用される数字スイッチ(1、0)(LOCK_STATE)
T = LOCK_STATE * DAMPING_COEFF * (| OMEGA_LEFT – OMEGA_RIGHT |)
ロック接続時の移行をスムーズに行うため、上記の式ではSTEP()関数が使用されます:
T = LOCK_STATE * STEP( OMEGA_DIFFERENCE, ALLOWABLE_SPEED_DIFFERENCE, ALLOWABLE_SPEED_DIFFERENCE + 0.1, DAMP_COEFF * OMEGA_DIFFERENCE )
トルクは、ドライブシャフトの左半分と右半分の間で作用します。
インターフェース
デフロックパラメータの操作を容易にするため、システムには値の編集に使用できるフォームが提供されています。結果のポスト処理中のプロットに出力を使用することもできます。
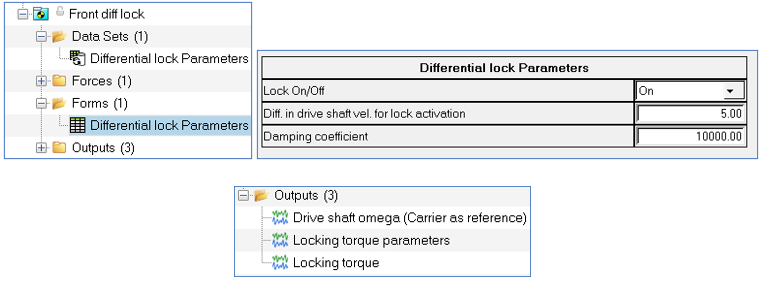
図 3. パラメータ編集と出力のインターフェース
図 3. パラメータ編集と出力のインターフェース