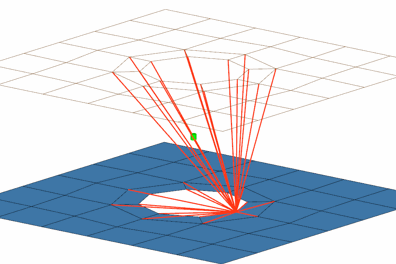
RgdBody (spider + washer) Creates a RgdBody rigidlink element for the body. Restriction: Only available in LS-DYNA. It connects to the nearest node to the connector position and then projects to the nearest nodes on the adjoining elements of the connected components. If holes are detected, the nodes on the edges and the washer nodes are connected. Figure 1.