インターフェース
CVTパワートレインは、Control State Equation(CSE)によって記述されます。パワートレインへの入力は、スロットルと変速機入力シャフト速度です。出力はセカンダリプーリーのトルクです。オプションで、パワートレインへの2つのクランプ力の入力があります。CVTプロパティファイルにより、機械的CVTまたは電動 / 油圧CVT間の選択が可能になります。デフォルトでは、MSは機械的CVTをモデル化し、クランプ力はCVTプロパティファイル内のパラメータに基づいて計算されます。
CLAMP_MECHの値が‘CENTRIFUGAL’以外の場合、クランプ力の値は計算されないので、ユーザーがモデルに入力する必要があります。
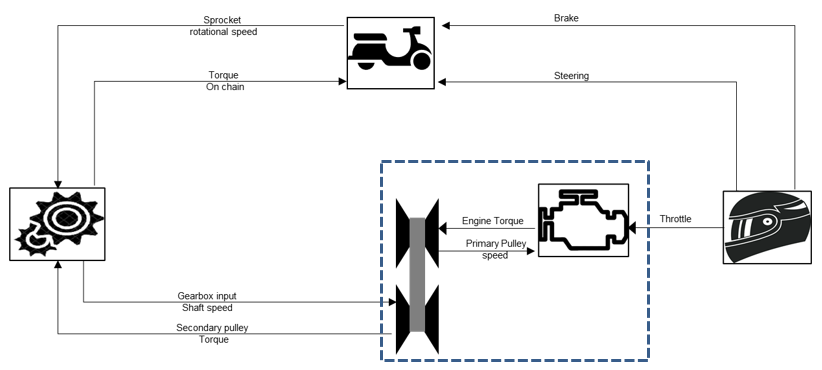 図 1. CVTパワートレインの図
図 1. CVTパワートレインの図
図 1. CVTパワートレインの図モデルには入力としてCVTプロパティファイルが必要です。プロパティファイルには、状態導関数と出力を評価するときに考慮されるパラメータとオプションが含まれています。CVTプロパティファイルの拡張子は‘.cvt’です。次のパラメータが含まれています:
| パラメータ | 内容 | 単位 | シンボル |
|---|---|---|---|
| BELT_TYPE | バリエーターのベルトのタイプ(ゴム、鋼など)。現在はこのパラメータの値に関係なくベルトは剛体と見なされる。 | ||
| CLAMP_MECH | クランプ力の生成メカニズム。CENTRIFUGALまたはユーザー定義の名前。 | ||
| RP_MAX | プライマリプーリーのベルトの最大実行半径。 | 長さ |  |
| RP_MIN | プライマリプーリーのベルトの最小実行半径。 | 長さ |  |
| RS_MAX | セカンダリプーリーのベルトの最大実行半径。 | 長さ |  |
| RS_MIN | セカンダリプーリーのベルトの最小実行半径。 | 長さ |  |
| THETA | プーリーのウェッジ角の半分。 | 角度 |  |
| BELT_LENGTH | ベルトの長さ。一定と見なされる。 | 長さ |  |
| MU_STATIC | ベルトが移動しないときのベルトとプーリー間の摩擦値。 |  |
|
| MU_DYNAMIC | ベルトがプーリー上でスリップするときのベルトとプーリー間の摩擦値。 |  |
|
| BELT_MASS | ベルトの質量。 | 質量 |  |
| PULLEY_DISTANCE | プライマリプーリーとセカンダリプーリー間の距離。 | 長さ |  |
| NO_ROLLERS | ローラーの数。 |  |
|
| ROLLER_MASS | ローラーの質量。 | 質量 |  |
| P_SHEAVE_ANGLE | プライマリプーリーの移動シーブの内角。 | 角度 |  |
| KP | プライマリプーリーのスプリング剛性。 | フォース / 長さ |  |
| KP_LOAD | プライマリプーリーのスプリングの初期荷重。 | 長さ |  |
| KS | セカンダリプーリーのスプリング剛性。 | フォース / 長さ |  |
| KS_LOAD | プライマリプーリーのスプリングの初期荷重。 | 長さ |  |
| KT | トーションスプリング剛性。 | フォース x 長さ / 角度 |  |
| KT_LOAD | 初期荷重トーション角 | 角度 |  |
| HELIX_RAD | らせん半径 | 長さ |  |
| HELIX_ANGLE | ねじれ角 | 角度 |  |
| RADIAL_SHIFT_PROFILE | プライマリプーリーの移動シーブの軸方向変位に対する回転シャフトからのローラー半径およびランプ角の変化。 | 長さ対長さ、角度対長さ |  および および |
| CMM | 半径比を基準にしたCMM係数と推力比(無次元)の変化。 | 1 / (フォース x 角度) |
CVTパワートレインからの出力は以下のとおりです:
| 出力名 | リクエストID | 要素 | コンポーネント | 単位 | |||
|---|---|---|---|---|---|---|---|
| Throttle position, input throttle, static throttle | 1 | 1 | 変更されたスロットル位置 | 0-1 | |||
| 2(中) | スロットル要求 | 0-1 | |||||
| 5 | スロットルモジュレーションインジケーター | ||||||
| Radius ratio, Radius - Pr. pulley, Radius - Sec. pulley, Alpha, Beta | 2 | 1 | 幾何学的ギア比 / プーリーの実行半径比 | ||||
| 2 | プライマリプーリーの半径 | 長さ | |||||
| 3 | セカンダリプーリーの半径 | 長さ | |||||
| 5 | プライマリプーリーのラップ角 | Angle | |||||
| 6 | セカンダリプーリーのラップ角 | Angle | |||||
| Eng. omega (rad/s), Eng. omega (rpm), Engine trq., [d/dt] Engine trq. | 3 | 1 | エンジンスピード | RPM | |||
| 2 | エンジンスピード | Rad | |||||
| 3 | エンジントルク | フォース*長さ | |||||
| 5 | Engine Speed Derivative | ラジアン/秒 | |||||
| Pr. pulley trq., Sec. pulley trq., Pr. pulley frc., Sec. pulley trq., k_thrust | 4 | 1 | プライマリプーリーのトルク | フォース*長さ | |||
| 2 | セカンダリプーリーのトルク | フォース*長さ | |||||
| 3 | プライマリのクランプ力 | フォース | |||||
| 5 | セカンダリのクランプ力 | フォース | |||||
| 6 | 静止クランプ力比 | ||||||
| 7 | ベルトスリップ | ||||||
| CVT pri. pulley [Sh. shft., Rad. shft., Ramp ang., Spr. frc., Fly. wt. frc.] | 5 | 1 | プライマリプーリーのシーブの軸上シフト | 長さ | |||
| 2(中) | ローラー半径シフト | 長さ | |||||
| 3 | プライマリプーリーのシーブのランプ角 | Angle | |||||
| 5 | プライマリプーリーのスプリング力 | フォース | |||||
| 6 | フライウェイト / ローラーによる遠心力 | フォース | |||||
| 7 | 0 | ||||||
| CVT sec. pulley [Sh. shft., Spr. rot., Helix frc., Spr. frc., Spr. trq., Trq. feedback] | 6 | 1 | セカンダリプーリーのシーブの軸上シフト | 長さ | |||
| 2(中) | セカンダリプーリーのスプリング回転 | Angle | |||||
| 3 | らせん力 | フォース | |||||
| 5 | セカンダリプーリーのスプリング線形力 | フォース | |||||
| 6 | セカンダリプーリーのスプリングのトルク | フォース*長さ | |||||
| 7 | トルクのフィードバック | フォース | |||||
リクエストIDは、出力の作成に使用されるPOWERTRAIN_REQ関数を参照します。
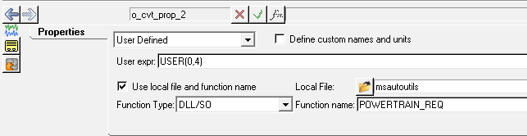 図 2.
図 2.
図 2. MotionViewでは、次の6つの出力がPOWERTRAIN_REQ “USER(0,id)”にアクセスし、HyperGraphで別のプロットを表示します。
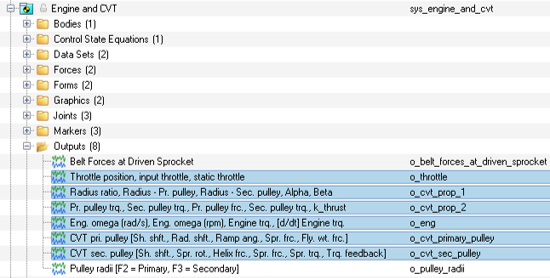 図 3.
図 3.