ショックアブソーバー
ショックアブソーバーは、サスペンションスプリングに蓄積されたエネルギーを放散し、シャーシの動きを減衰させるように設計されたダンパエンティティです。
ショックアブソーバー力は、線形タイプまたは非線形タイプで、TeimOrbitフォーマットのプロパティファイルに保存されている、力と変位のテーブルから計算できます。
パラメータ
- Damper Type
- ショックアブソーバーは線形タイプまたは非線形タイプの場合があります。線形を選択するとDamping Constantオプションが有効になり、非線形を選択するとProperty Fileオプションが有効になります。
- Damping Constant
- ショックアブソーバーが線形タイプの場合に使用される減衰定数値。
- Property File
- ショックアブソーバ特性で、力と速度のテーブルを記述したTeimOrbitTeimOrbit形式のプロパティファイルに格納されています。
- Use Rebound Stop
- Rebound Stopエンティティを含めて、リバウンドでのショックアブソーバー成分を制限します。リバウンドストップは、ショックアブソーバー内で定義されているものと同じボディおよびポイントに接続されます。詳細については、リバウンドストップのドキュメントをご参照ください。
- Use Bump Stop
- Bump Stopエンティティを含めて、ジャウンスでのショックアブソーバー成分を制限します。バンプストップは、ショックアブソーバー内で定義されているものと同じボディおよびポイントに接続されます。詳細については、バンプストップのドキュメントをご参照ください。
- Scale
- スケールオプションにより、プロパティファイルを直接修正することなく、力とスプリングの高さをスケーリングすることができます。
- Graphics
- MotionViewでは、2つの円筒のグラフィックスでショックアブソーバーのロッドとチューブが表されます。このパラメータでは、可視化のためにRodとTubeの半径を変更できます。
ショックアブソーバーの接続
-
ショックアブソーバーのエンティティエディターを開いてパラメータを編集します。
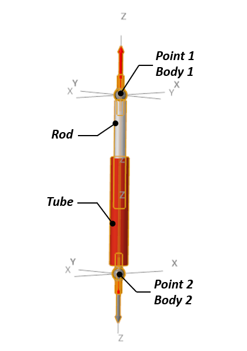
図 1. ショックアブソーバーの接続性
ショックアブソーバーのプロパティファイル
ショックアブソーバープロパティは、TeimOrbit形式のプロパティファイルに保存されます。モデルをソルバーに送ると、MotionSolveによってプロパティファイルが読み込まれ、シミュレーションの際に使用されます。プロパティファイルで指定された単位とモデルの単位が異なる場合、ソルバーによって、プロパティがモデルの単位に変換されますが、元のプロパティファイルは変更されません。
ショックアブソーバープロパティファイルには、ヘッダー、単位、およびカーブのブロックが記述されています。単位ブロックは、ファイルで使用される長さ、質量、フォース、時間、角度の単位を指定します。カーブブロックは、減衰力成分のフォース値に対する速度値のテーブルを保持します。データは昇順でなければなりません。
ショックアブソーバープロパティファイルの例を以下に示します:
$----------------------------------------------------------- HEADER
[HEADER]
FILE_TYPE = 'dpr'
FILE_VERSION = 4.0
FILE_FORMAT = 'ASCII'
$---------------------------------------------------------------------UNITS
[UNITS]
LENGTH = 'mm'
ANGLE = 'degrees'
FORCE = 'newton'
MASS = 'kg'
TIME = 'second'
$---------------------------------------------------------------------CURVE
[CURVE]
{ vel force}
-4916.935 -8.889
-1000.0 -3.0
-500.0 -1.5
-250.0 -0.75
-100.0 -0.3
0.0 0.0
100.0 0.3
250.0 0.75
500.0 1.5
1000.0 3.0
4914.298 9.0416
出力
MotionSolve .pltおよび.abfファイルのショックアブソーバー出力チャンネルを以下の表にまとめます。
長さおよび長さの変化率は、Point 1とPoint 2の間のラインに沿って測定されます。ダンパーフォースも同じラインに沿って作用します。正のフォースが作用するとボディは引き離され、負のフォースが作用するとボディは引き寄せられます。
| タイプ | コンポーネント | 量 |
|---|---|---|
| User Defined (.plt) REQSUB (.abf) |
ShockAbsorber - Damper Output | 長さ |
| 長さの変化率 | ||
| ダンパーフォース | ||
| Direction Cosine - X | ||
| Direction Cosine - Y | ||
| Direction Cosine - Z |