ブロックフォーマットキーワード 節点のグループに対する強制変位を定義します。
フォーマット
| (1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
| /IMPDISP/impdisp_ID/unit_ID |
| impdisp_title |
| fct_IDT |
Dir |
Skew_ID |
sens_ID |
grnd_ID |
|
icoor |
|
|
|
| Ascalex |
FscaleY |
Tstart |
Tstop |
|
|
定義
| フィールド |
内容 |
SI単位の例 |
| impdisp_ID |
強制変位ブロックの識別子 (整数、最大10桁)
|
|
| unit_ID |
単位識別子。 (整数、最大10桁)
|
|
| impdisp_title |
強制変位ブロックのタイトル (文字、最大100文字)
|
|
| fct_IDT |
時間関数の識別子 (整数)
|
|
| Dir |
方向:並進はX、Y、Z。回転はXX、YY、ZZ。 (テキスト)
|
|
| Skew_ID |
スキューの識別子 (整数)
|
|
| sens_ID |
センサーの識別子
- ≠ 0(センサーアクティブ化)
- 強制変位はセンサーのアクティブ化の際に適用され、関数の時間がシフトされます。
(整数)
|
|
| grnd_ID |
強制変位が適用される節点グループ (整数)
|
|
| icoor |
局所座標系使用タイプ
- = 0
- デカルト座標系
- = 1
- 円筒座標系
(整数)
|
|
| Ascalex |
fct_IDTの横軸(時間)のスケールファクター デフォルト = 1.0(実数)
|
|
| FscaleY |
fct_IDTの縦軸(変位)のスケールファクター デフォルト = 1.0(実数)
|
または
|
| Tstart |
開始時間 (実数)
|
|
| Tstop |
停止時間 デフォルト = 1030(実数)
|
|
コメント
- 変位方向は、フィールド番号2の10文字内で右詰めにする必要があります。
- TstartおよびTstopが指定されている場合、これらの間の時間に対して変位が強制されますが、時間対加変位の関数をTstartに開始するための時間シフトは行われません。
- センサーsens_IDが定義されている場合、強制変位はセンサーをアクティブにする時点で適用され、時間関数がセンサーアクティブ化時間でシフトされます。
- センサーsens_IDがTstartおよびTstopと使用されていると、センサーアクティブ化時間がTstartおよびTstopの間で起こる場合にのみ、強制変位が発生します。
- 横軸(時間)と縦軸(並進または角加速度)のスケーリングにはAscaleXとFscaleYが使用されます。
実際の荷重関数値は次のように計算されます:
(1)
ここで、
はfct_IDTの関数です。
- icoor=1の場合、方向X、Y、Z(XX、YY、 ZZも同様)は 半径方向 (r)、方位角方向(
)と長さ方向(Z)(/SKEW/FIX)の並進(軸周りの回転も同様)です。
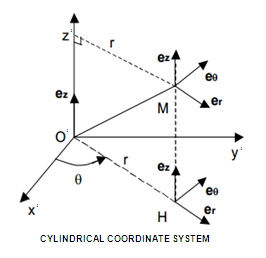
図 1.
- icoor=1の場合、併進変位が半径方向や、同様に方位角方向に課された時、節点の変位は次のように設定されます:(2)
(3)
ここで、
はfct_IDTの関数です。