Braking In a Turn
Braking in a turnイベントは円形路での車両の減速をシミュレートします。
このイベントの目的は、ブレーキと旋回を行った際の車両の安定性を測定することです。車両は指定した長さの直進路を走行してから円形路に入ります。“Time to Apply Brakes”の時間に、車両が“Desired Deceleration”の率で減速するように、“Brake Step Duration”の時間を使用してブレーキトルクの勾配が決定されます。イベントは“End of Simulation”の時間に終了します。
Braking in a turnイベントは、Cars & Small Trucks、Heavy Trucks、Two-Wheeler vehicleライブラリによってサポートされています。結果をプロットするためのプロットテンプレートが用意されています。
Braking in a turnイベントは、ISO 7376-2006 - Passenger cars — Braking
in A Turn - Open-loop test methodに準拠しています。
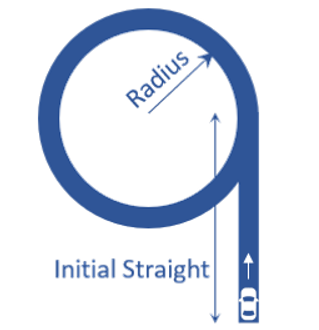
図 1. Braking in a turn - 定常状態になってからブレーキをかけます
図 1. Braking in a turn - 定常状態になってからブレーキをかけます
パラメータ
| パラメータ名 | 説明 |
|---|---|
| Units | Length(長さ)、Velocity(速度)、Acceleration(加速度)の単位。
|
| Radius | 円部分の半径: イベントの一定半径旋回の部分では車両の重心がこの円に沿って走行します。 |
| Initial straight | 一定半径旋回前のイベントの直線距離。 |
| Initial velocity | 初期車両速度。 |
| Final velocity | シミュレーションで目的とする最終速度。 |
| Initial lateral acc | 初期加速度の推定値。この値は編集不可で、initial velocityとradiusのパラメータを使って計算されます。 |
| Final lateral acc | 最終加速度の推定値。この値は編集不可で、initial velocityとradiusのパラメータを使って計算されます。 |
| Deceleration | 定常状態に達した車両で目的とする減速度。 |
| Turn direction | イベント時の車両の旋回方向です(ドライバーから見た方向)。 |
| Brake step duration | 目的とする減速のステップ期間。 |
コントローラー設定
- Non-leaning events (Cars/Trucks)
- LONGITUDINAL – TRACTION CONTROLLER SETTINGS
- 追加のコントロールを使用します:トラクションコントロールの追加フィードバック制御を有効にします。コントローラのゲインは、このチェックボックスを切り替えることで編集できます。
Kp フィードバックPIDコントローラーの比例ゲイン Ki フィードバックPIDコントローラーの積分ゲイン Kd フィードバックPIDコントローラーの微分ゲイン
- 追加のコントロールを使用します:トラクションコントロールの追加フィードバック制御を有効にします。コントローラのゲインは、このチェックボックスを切り替えることで編集できます。
- Leaning events (Two-wheelers)
- LONGITUDINAL – TRACTION CONTROLLER SETTINGS
- 追加のコントロールを使用します:トラクションコントロールの追加フィードバック制御を有効にします。コントローラのゲインは、このチェックボックスを切り替えることで編集できます。
Kp フィードバックPIDコントローラーの比例ゲイン Ki フィードバックPIDコントローラーの積分ゲイン Kd フィードバックPIDコントローラーの微分ゲイン
- 追加のコントロールを使用します:トラクションコントロールの追加フィードバック制御を有効にします。コントローラのゲインは、このチェックボックスを切り替えることで編集できます。
信号設定
信号設定を使用して、Driverから出力するステアリング、スロットル、ブレーキ、ギア、およびクラッチの各信号の最小値、最大値、スムージング周波数、および初期値を設定します。スムージング周波数を使用して、Driverによる信号変更の頻度を制御します。Driverからの閉ループ制御信号のみが平滑化されます。開ループ信号は平滑化されません。
Road Settings
Flat Event、Road File、Tiresの3つのオプションがあります。
- Flat Road
- 路面ファイルを必要としない、平坦で滑らかな路面をイベントに使用します。Flat Roadを選択すると、グラフィック設定オプションが以下のパラメータで利用可能になります:
- View path centerline: イベント経路の可視化を有効にします。
- このチェックボックスは、経路を使用しない開ループイベントでは無効になります。
- View grid graphics: 路面のグリッドグラフィックの視覚化を有効にします。
- View grid graphicsチェックボックスをオンにすると、Grid Settingsタブで路面グリッドのパラメータを編集できます。
Grid length 路面の長さを指定します。モデルの単位に正の値を入力します。 Grid Width 路面の幅を定義します。モデルの単位に正の値を入力します。 Grid X offset 路面グラフィックに対して長手方向の距離オフセットを与えます。モデルの単位に正の値を入力します。 Grid Y offset 路面のグラフィックに対して横方向の距離オフセットを与えます。モデルの単位に正の値を入力します。
- View path centerline: イベント経路の可視化を有効にします。
- Road File
- Road Fileオプションでは、イベントで使用する路面ファイルを選択できます。このオプションを使用すると、モデル内のすべてのタイヤは、タイヤエンティティに含まれるファイルではなく、イベントで指定された路面ファイルを考慮します。
- Tires
- 路面選択オプションとしてTireを使用すると、tireエンティティで指定された路面ファイルがイベントシミュレーションで使用されます。
自動出力レポート
Braking in a turnイベントレポートの出力リストは以下の通りです:
| Report Name | Report Signals |
|---|---|
| Vertical Tire Forces |
|
| Axle Loads |
|
| Steering Input and Acceleration |
|
| Lateral Load Transfer |
|
| Longitudinal Acceleration vs. Time | |
| Vehicle CG Displacement vs. Time |