J-turn
J-turnイベント(またはフィッシュフック操縦)は、ある方向に大きくステアを切り、車両が応答できるよう滞留時間をとり、反対方向に大きくステアを切るという車両の応答を、応答時間を延長して(運転しシミュレートします。
このイベントは、車両の安定性を明らかにするために使用されます。ステアリング入力の符号を逆にすることによって、どちらの操縦方向にすることも可能です。Altair Driverを使用して車両を一定速度に維持します。またTireシステムとOutput Requestsシステムには、車両とタイヤの標準出力が組み込まれています。
J-turnイベントは、ISO +7401-2003 - Road vehicles - Lateral transient response test methods - Open-loop test methodsに準拠しています。また、DOT publication DOT HS 809 705、”Phase VIII of NHTSA's Light Vehicle Rollover Research Program-A Demonstration of the Dynamic Tests Developed for NHTSA's NCAP Rollover Rating System”で説明されているNHTSAフィッシュフックテストをシミュレートできるよう設計されています。
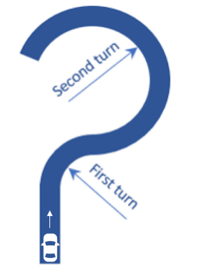
図 1. J-turnイベント
パラメータ
| パラメータ名 | 説明 |
|---|---|
| Units | Length(長さ)、Velocity(速度)、Acceleration(加速度)の単位。
|
| Velocity | 初期車両速度。 |
| Initial power run | イベントの開始で、車両が定常状態に達したことを確認する時間。 |
| First turn direction | 最初の旋回で使用するステア方向。 |
| First steer angle* | 最初のステアリング入力の角度(度)。正の数では車両が右に、負の数では車両が左に曲がります。 |
| First lean angle** | 1回目の旋回の要求傾斜角度。 |
| First step duration | 1回目のステア角の入力に要する時間(ステップ関数を使用してステアリングホイールに角度を入力します)。 |
| First turn duration | ステアリングを1回目のステア角に保持しておく期間。 |
| Second turn direction | 2度目の旋回で使用する方向を定義。 |
| Second steer angle* | 2回目のステア入力のステア角(度単位)。 |
| Second lean angle** | 2回目の旋回の要求傾斜角度。 |
| Second step duration | 2回目のステア角の入力に要する時間(ステップ関数を使用してステアリングホイールに角度を入力します)。 |
| Second turn duration | ステアリングを2回目のステア角に保持しておく期間。 |
*車/トラック、すなわち傾斜を考慮しないイベントにのみ適用されます。
**二輪車、すなわち傾斜を考慮するイベントにのみ適用できます。
コントローラー設定
- Non-leaning events (Cars/Trucks)
- LONGITUDINAL – TRACTION CONTROLLER SETTINGS
- 追加のコントロールを使用します:トラクションコントロールの追加フィードバック制御を有効にします。コントローラのゲインは、このチェックボックスを切り替えることで編集できます。
Kp フィードバックPIDコントローラーの比例ゲイン Ki フィードバックPIDコントローラーの積分ゲイン Kd フィードバックPIDコントローラーの微分ゲイン
- 追加のコントロールを使用します:トラクションコントロールの追加フィードバック制御を有効にします。コントローラのゲインは、このチェックボックスを切り替えることで編集できます。
- Leaning events (Two-wheelers)
- LONGITUDINAL – TRACTION CONTROLLER SETTINGS
- 追加のコントロールを使用します:トラクションコントロールの追加フィードバック制御を有効にします。コントローラのゲインは、このチェックボックスを切り替えることで編集できます。
Kp フィードバックPIDコントローラーの比例ゲイン Ki フィードバックPIDコントローラーの積分ゲイン Kd フィードバックPIDコントローラーの微分ゲイン
- 追加のコントロールを使用します:トラクションコントロールの追加フィードバック制御を有効にします。コントローラのゲインは、このチェックボックスを切り替えることで編集できます。
信号設定
信号設定を使用して、Driverから出力するステアリング、スロットル、ブレーキ、ギア、およびクラッチの各信号の最小値、最大値、スムージング周波数、および初期値を設定します。
スムージング周波数を使用して、Driverによる信号変更の頻度を制御します。Driverからの閉ループ制御信号のみが平滑化されます。開ループ信号は平滑化されません。
Road Settings
- Flat Road
- 路面ファイルを必要としない、平坦で滑らかな路面をイベントに使用します。Flat Roadを選択すると、グラフィック設定オプションが以下のパラメータで利用可能になります:
- View path centerline: イベント経路の可視化を有効にします。
- このチェックボックスは、経路を使用しない開ループイベントでは無効になります。
- View grid graphics: 路面のグリッドグラフィックの視覚化を有効にします。
- View grid graphicsチェックボックスをオンにすると、Grid Settingsタブで路面グリッドのパラメータを編集できます。
Grid length 路面の長さを指定します。モデルの単位に正の値を入力します。 Grid Width 路面の幅を定義します。モデルの単位に正の値を入力します。 Grid X offset 路面グラフィックに対して長手方向の距離オフセットを与えます。モデルの単位に正の値を入力します。 Grid Y offset 路面のグラフィックに対して横方向の距離オフセットを与えます。モデルの単位に正の値を入力します。
- View path centerline: イベント経路の可視化を有効にします。
- Road File
- Road Fileオプションでは、イベントで使用する路面ファイルを選択できます。このオプションを使用すると、モデル内のすべてのタイヤは、タイヤエンティティに含まれるファイルではなく、イベントで指定された路面ファイルを考慮します。
- Tires
- 路面選択オプションとしてTireを使用すると、tireエンティティで指定された路面ファイルがイベントシミュレーションで使用されます。
自動出力レポート
| Report Name | Report Signals |
|---|---|
| Tire Lateral Slip |
|
| Vertical Tire Forces |
|
| Vertical Tire Forces vs. Lateral Acceleration |
|
| Axle Loads |
|
| Steering, Torque and Roll |
|
| Sideslip |
|
| CG Sideslip Angle |
|
| Lateral Load Transfer |
|
| Steering Wheel Angle vs. Time | |
| Vehicle CG Displacement vs. Time |