n-Post Shaker
n-Post Shakerイベントでは、ポストでテストリグ上に支持している車両をシミュレーションします。
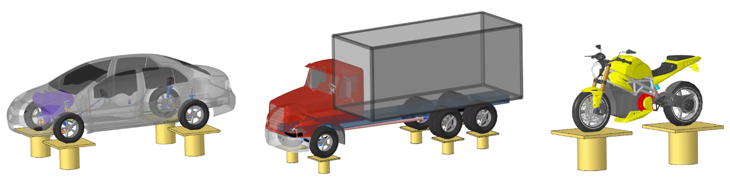
図 1. 車両、大型トラック、二輪車ライブラリのn-postイベント
このポストを入力信号で駆動して、車両を励振します。予測された荷重と加速度の形式による車両の応答を使用して、耐久性と乗り心地を評価できます。
ポストを駆動する入力信号として、変位またはフォースとモーメントを使用できます。この信号は、合成で作成できるほか、テストから取得することもできます。このイベントの標準出力のほか、必要に応じ、耐久性解析に使用できるように、任意の車両部品に対する荷重を出力できます。
n-postイベント実行されるアクションのシーケンス
本項では、イベントを実行したときにMotionViewとMotionSolveで実行されるアクションのシーケンスについて説明します。- MotionView
-
- 加速度である任意の入力信号を変位信号に変換し、その信号をCSVファイルとして、加速度データファイルと同じフォルダーに保存します。
- AutoTireシステムを非アクティブにします。
- ソルバー入力ファイルにモデルを書き込みます。このソルバー入力ファイルは、信号を自身に保存しているのではなく、入力信号ファイルを参照します。
- MotionSolve
-
- 車両の縦方向の運動、横方向の運動、ヨー方向の運動、ステアリング入力、各ホイールの回転がロックされているときに、車両に対して静的シミュレーションを実行します。
- 入力信号ファイルのロックを解除します。
- 入力信号ファイルを読み取ります。
- 時間0.0から終了時間まで、Akimaの手法を使用して入力信号を補間しながら動的シミュレーションを実行します。
注: 選択した入力がForce/Momentで、‘Add Wheel Reaction Forces’オプションをチェックしている場合は、タイヤに対する反作用力が評価され、ホイールに適用されます。
Post Types
- Wheel Posts
- n-Postイベントを追加すると、そのイベントによってモデルに検出されたTireごとにホイールポストが追加されます。それらのTireは、それぞれに対応するポストに結合されます。
- 補助ポスト
- 補助ポストを使用して、空力など、路面以外の励振を検討対象にすることができます。
- 各補助ポストのアタッチメントは、Body、Apply to Point、およびMount Pointで構成されます。注: フォース / 変位の適用方向は、Mount PointからApply to Pointになります。
- ポールは、両端のボールジョイントを使用して、フォース / 変位が適用されるボディと、ポールが取り付けられているボディ(Ground Body)に接続されます。
- 各補助ポストのアタッチメントは、Body、Apply to Point、およびMount Pointで構成されます。
プロパティ
- References
-
このイベントのシミュレーションでは、3つのジョイントを使用して車両の動作を制約します。
名前 説明 Vehicle Body シミュレーション中に車両を拘束するために使用するアタッチメント。 Steering Joint シミュレーション中にステアリングジョイントをロックするためのアタッチメント。 Constraint 1とConstraint 2 静止時に車両を保持するオプションのアタッチメント。これらの制約は、静止後は無効になります。 - 車体とグラウンドボディとの間の垂直軸ジョイント。この制約は静解析でのみ使用され、過渡解析では無効になります。
- 車体とグラウンドボディとの間のインラインジョイント。この制約は静解析でのみ使用され、過渡解析では無効になります。
- ステアリングホイールジョイントを使用して、シミュレーションの際にステアリングホイールの動きをロックします。
- Settings
-
名前 説明 Vehicle Restraint シミュレーション中に使用された拘束の種類。 - Soft: 車体とグラウンドボディとの間のブッシュを追加。
- Hard: 車体とグラウンドボディとの間に固定ジョイントを追加。
- None:拘束なし。
Coupling - Spindle: ホイールの中心で、ホイールポストの垂直方向モーションにホイールボディが拘束されます。
- Tire: Post shakerはホイールのコンタクトパッチに取り付けられています。
Signal Type すべてのホイールポスト用の信号タイプ。 - Displacement
- Force/Moment
- 力/モーメントは、スピンドル連結済みホイールポストでサポートされます。
- ‘Add Wheel Reaction Forces’オプションをチェックしている場合は、静的シミュレーションの終了後、ホイールでの反作用力が計算され、ユーザーがホイールポスト用に指定したZ方向のフォース信号に加算されます。
- Acceleration
- 加速度は、まず変位に変換され、続いてその変位が適用されます。
Aux. Signal Type すべてのAuxiliaryポスト用の信号タイプ。 - Displacement
- Force/Moment
- Acceleration
- Bushing Settings
- Vehicle Restraint設定でSoftが選択されている場合、Bushing Settingsオプションを有効にすると、車両ボディとグラウンドボディの間にブッシュが追加されます。
- Vehicle Orientation
- Vehicle Orientationは、このセクションのマーカーの方向余弦を使用して変更することができ、車両の前面と左のベクトルを設定します。注:
- n-Postイベントは、モデル内の各Tireのポストを追加します。これらのポストは、車両の向きに応じて追加されます。イベントを追加する際に、AltairDriver Systemからの入力を元に、車両の向きを検出します。この方向は、n-Postイベントのすべての拘束、マーカー、および力/モーメントの参照として使用されます。
- AltairDriverによって指定された方向に問題がなければ、n-Postの方向は変更する必要はありません。ただし、n-Postイベントを追加した後、車両の向きを変更する必要がある場合は、AltairDriverとn-Postイベントパネル内の向きも更新する必要があります。
Post Settings
| 名前 | 説明 |
|---|---|
| Add Post | ポストを追加するダイアログを表示します(Wheel PostまたはAuxiliary Post)。 |
| Delete Post | Choose Postドロップダウンで選択したポストを削除します。 |
| Data Directory | 入力信号ファイルが保存されている場所。ポストのドライブファイルは、このディレクトリを基準とした相対ファイルパスで特定されます。 |
| Choose Post | ポストを選択します。ポストのリファレンスとデータ情報は以下を参照してください。 |
| References | Choose Postで選択したポストのアタッチメントを表示します。 |
| Spring Properties (Applicable for tire coupling case) |
|
| (X/Y/Z/RX/RY/RZ) Data | DisplacementおよびAccelerationの信号タイプでは、X、Y、Zの各方向を指定できます。Force/Momentの信号タイプでは、X、Y、Z各方向のフォース入力とX、Y、Z(RX、RY、RZ)各方向のモーメント入力を指定できます。
|
Run設定
| 名前 | 説明 |
|---|---|
| End time | シミュレーションの終了時間 |
| Print interval | シミュレーション出力の出力間隔。 |
加速度から変位への変換
次の関係式を使用して、測定した加速度信号を変位信号に変換します。
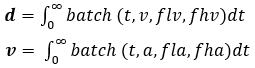
ここで、
 |
時系列データ |
 |
フィルタ処理した速度を積分した変位信号 |
 |
フィルタ処理した加速度を積分した速度信号 |
 |
測定した加速度データ |
 |
フィルタ周波数の帯域で適用するバッチフィルタ |
 |
加速度フィルタの下限周波数(0.5Hz) |
 |
加速度フィルタの上限周波数(1000 Hz) |
 |
速度フィルタの下限周波数(0.5Hz) |
 |
速度フィルタの上限周波数(1000 Hz) |
プロットアイコンを使用すると、その信号に指定されているデータ(ファイル名、チャンネル、スケール、オフセット)が、以下のプロセスを使用して変位に変換されます。
- 0.5Hzから1000Hzのバッチフィルタで加速度データをフィルタ処理し、データのDCオフセットを除去します。
- フィルタしたデータを時間で積分して速度データを生成します。
- 0.5Hzから1000Hzのバッチフィルタで、その速度データを再度フィルタ処理します。
- フィルタした速度データを時間で積分して変位データを生成します。
データと同じディレクトリに、“{ファイル名}_{チャンネル名}_disp.csv”のファイル名でファイルが書き込まれます。このファイルの1列目には時間、2列目には変位データが記述されています。
ここで生成した変位ファイルは、MotionSolveでシミュレーションに使用するXMLファイルで参照されます。
自動出力レポート
結果を表示するページとウィンドウのリスト。レポートでは、ソルバーデック(.xml)のエクスポート中に作成された.repファイルが使用されます。.repファイルには、プロットする信号に関する情報が含まれています。nPostイベントレポートの出力リストは以下の通りです:
| Report Name | Report Signals |
|---|---|
| Signal Type: Acceleration/Displacement |
|
| Signal Type: Force/Moments |
|